

A dual-arm collaborative flexible dragging and docking reverse operation method for an extravehicular robot
A robot and inverse operation technology, applied in the direction of manipulators, program-controlled manipulators, manufacturing tools, etc., can solve problems such as the inability to solve the problem of double-arm dragging body movement
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
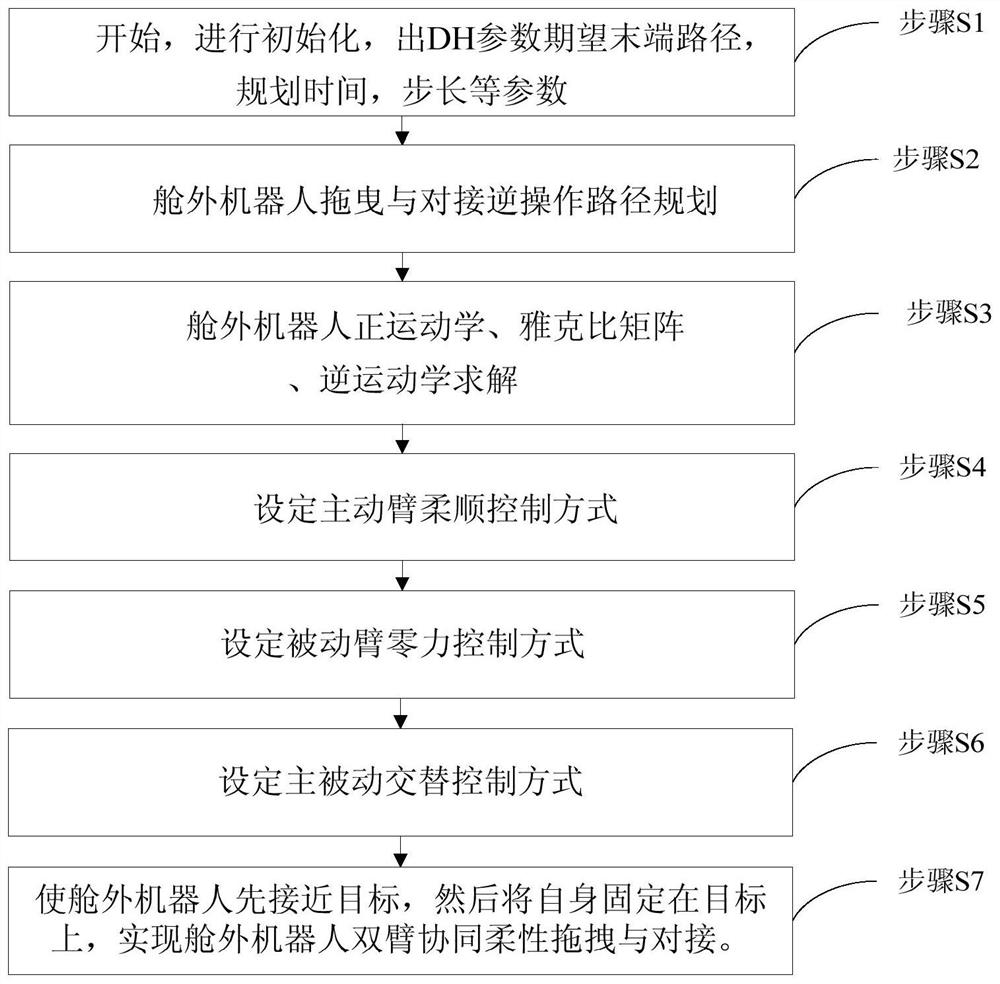
[0116] The present invention will be further described in detail below with reference to the accompanying drawings and specific embodiments.
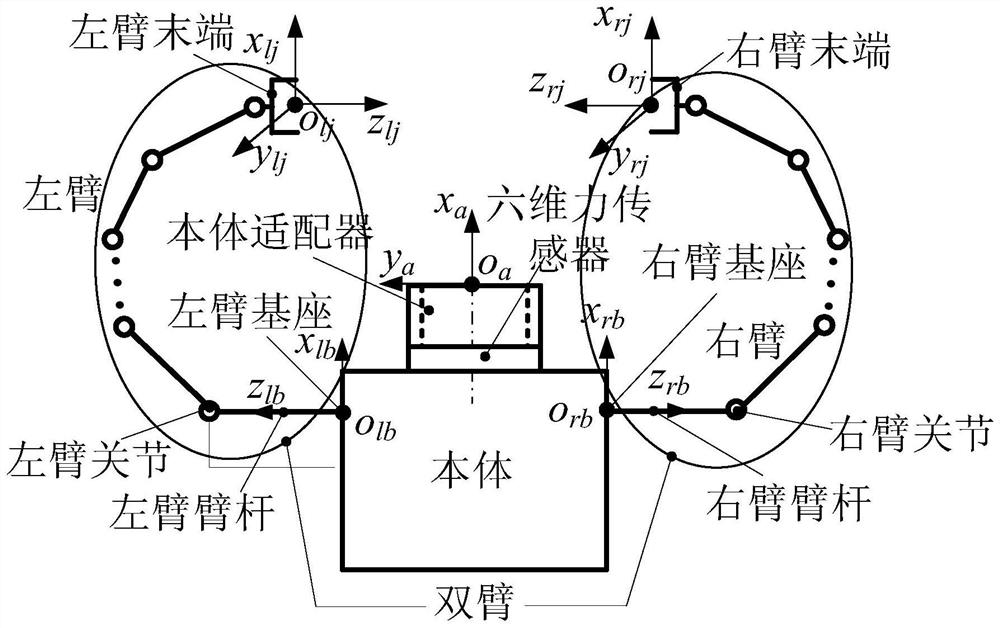
[0117] The present invention can be used in scenarios such as large space vehicles, space stations, lunar bases, etc. In the above scenarios, it can solve the problem of autonomous motion of the robot, and perform fine operations (such as screwing, plugging and unplugging, laser cutting) when it reaches the target position. Previously, the present invention could introduce the robot body with large inertia and mass into the target adapter in a compliant manner through an active and passive alternate control method, which could not be accomplished with conventional compliance strategies or obstacle avoidance.
[0118] The invention provides a double-arm coordinated flexible drag and docking reverse operation method for an extravehicular robot, which solves the problem that the robotic arm drags the body to the target adapter position in a...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More