

Arthropod-finger-imitated agile dexterous claw with friction pair driving and multi-flexible-shaft transmitting
An arthropod, friction pair technology, applied in the direction of rotating motion axis, manipulator, program-controlled manipulator, etc., can solve the problems of small size adaptability, no envelope grasping, no shape adaptability, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0082] The specific implementation manner of the present invention will be described below in conjunction with the accompanying drawings.
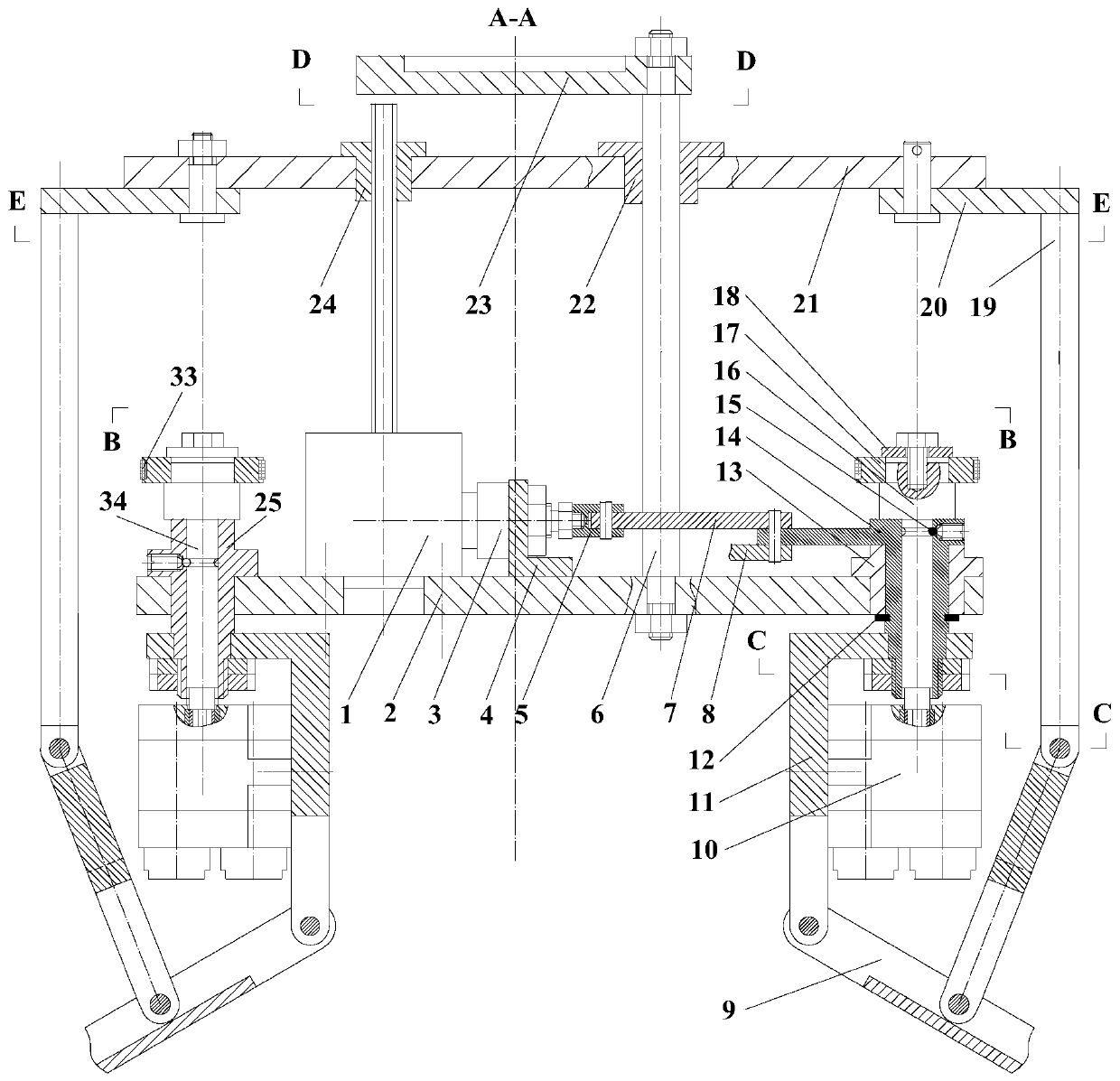
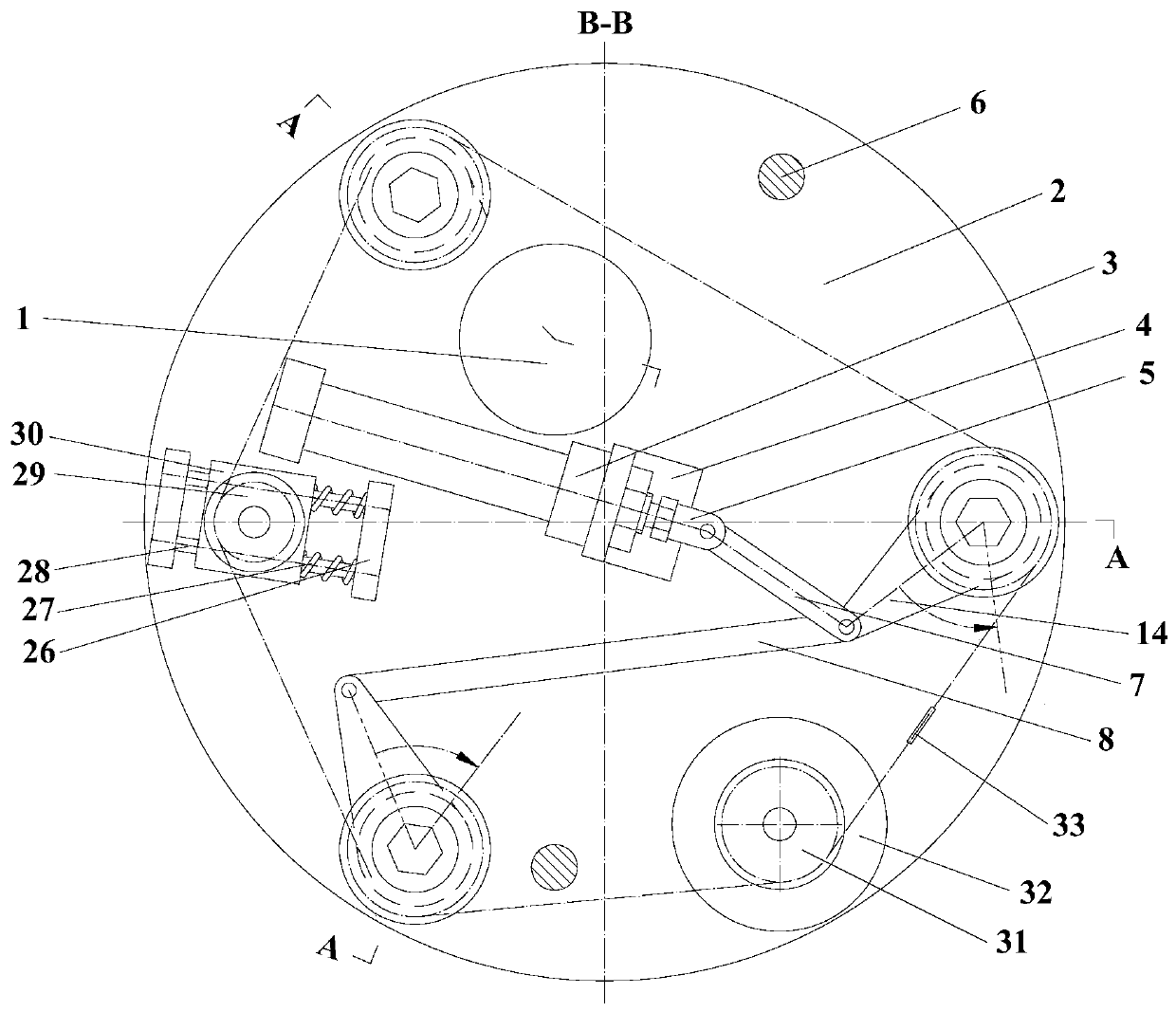
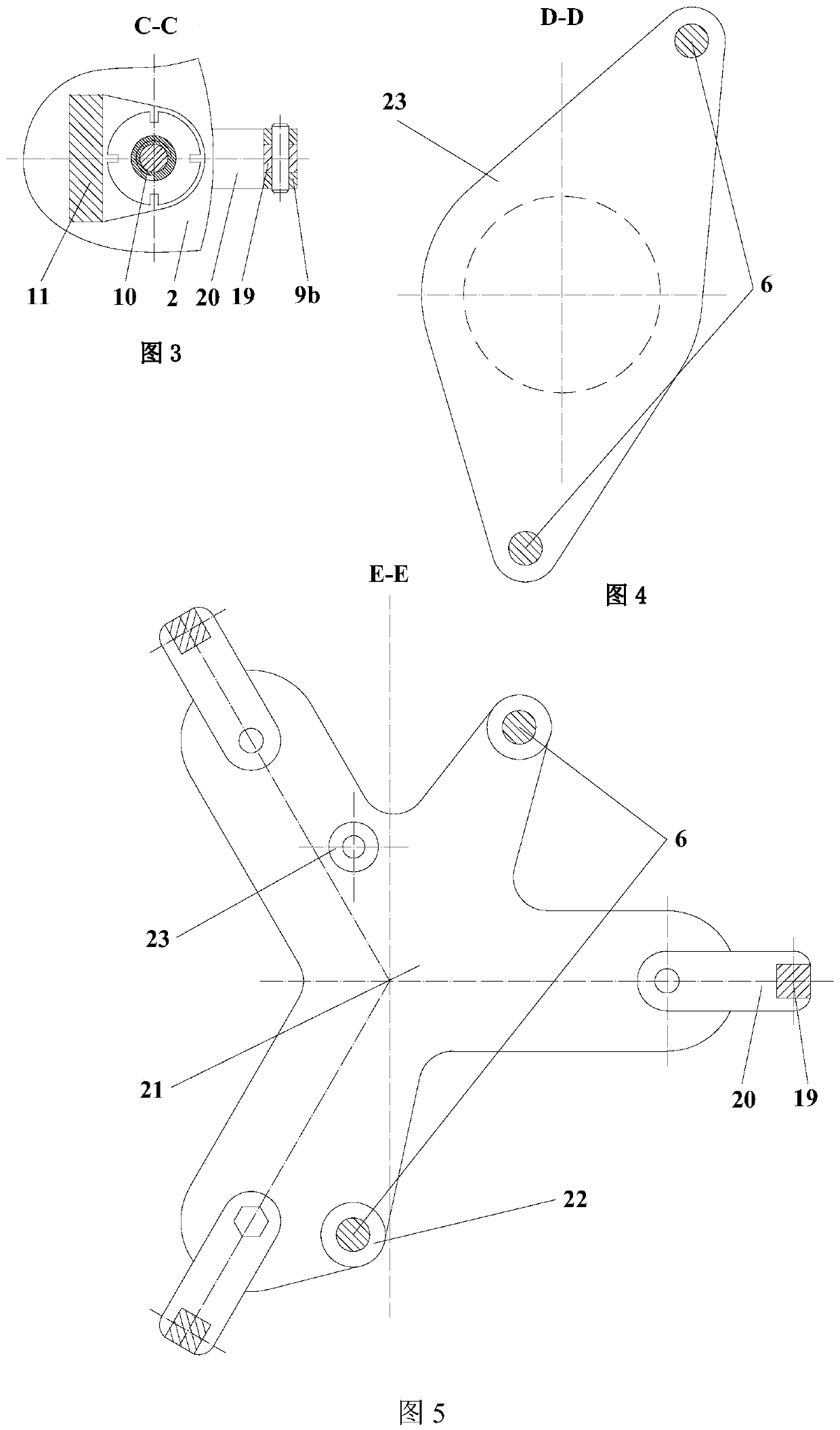
[0083] In this embodiment, a friction pair drives multiple flexible shafts to transmit an agile dexterous claw imitating arthropod fingers. The structure of the dexterous dexterous claw includes a palm, and three finger parts connected to the palm with the same structure and evenly installed along the circumference , and constant torque three-axis output device;
[0084] The components of the nimble claw are: motor 1, bottom plate 2, inner guide pen-shaped cylinder 3, L-shaped cylinder support 4, double ear seat 5, guide rod 6, slider connecting rod 7, long connecting rod 8, finger parts 9 , constant torque three-axis output device 10, finger root support 11, elastic snap ring for shaft 12, copper sleeve seat 13, crank sleeve 14, ball 15, drive shaft 16, pulley 17, round cover 18, single ear push Rod 19, small strip plate 20, finger root ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More