Robot behavior verification and recognition method based on GA-BP network
A technology of GA-BP and recognition method, which is applied in the direction of neural learning method, character and pattern recognition, biological neural network model, etc., can solve the problem of falling into local optimum, and achieve the effect of improving the efficiency of imitation learning
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0045] Below in conjunction with accompanying drawing and specific embodiment the present invention is described in further detail:
[0046] The invention provides a robot behavior verification and recognition method based on the GA-BP network, realizes precise behavior recognition, and can improve the efficiency of robot motion imitation.
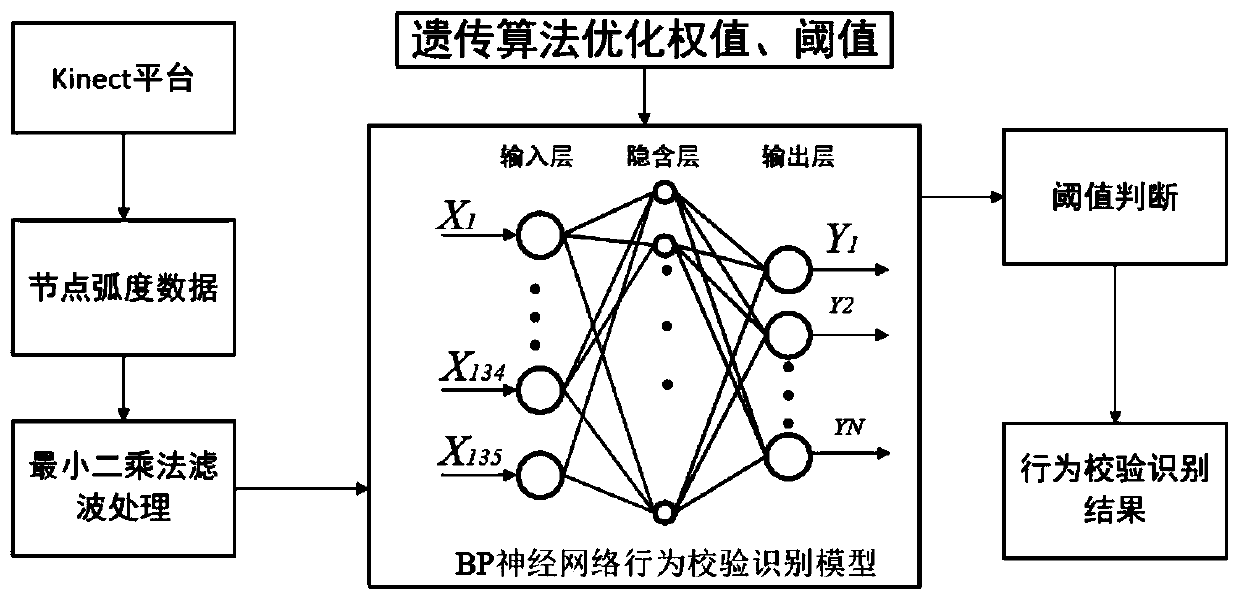
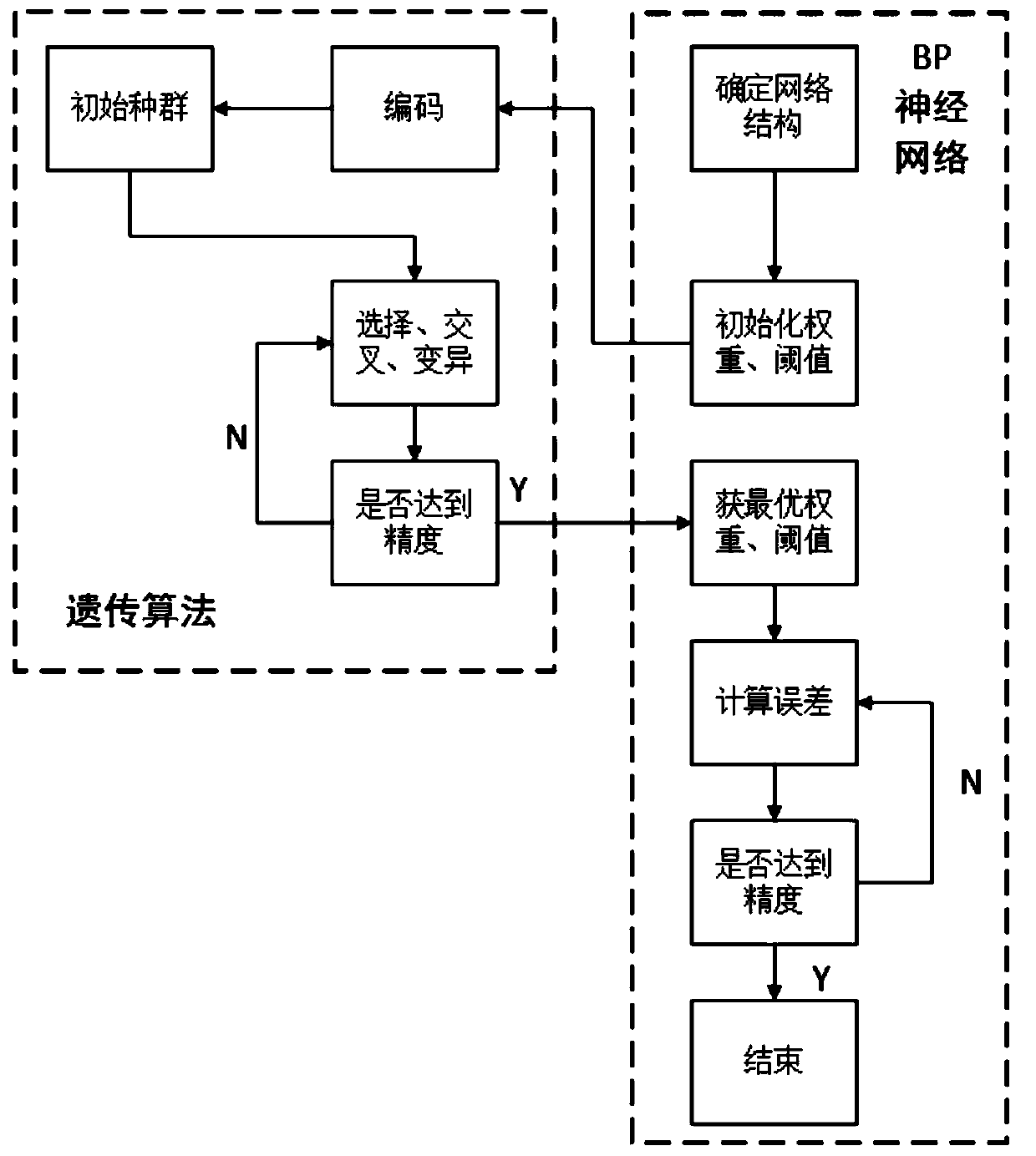
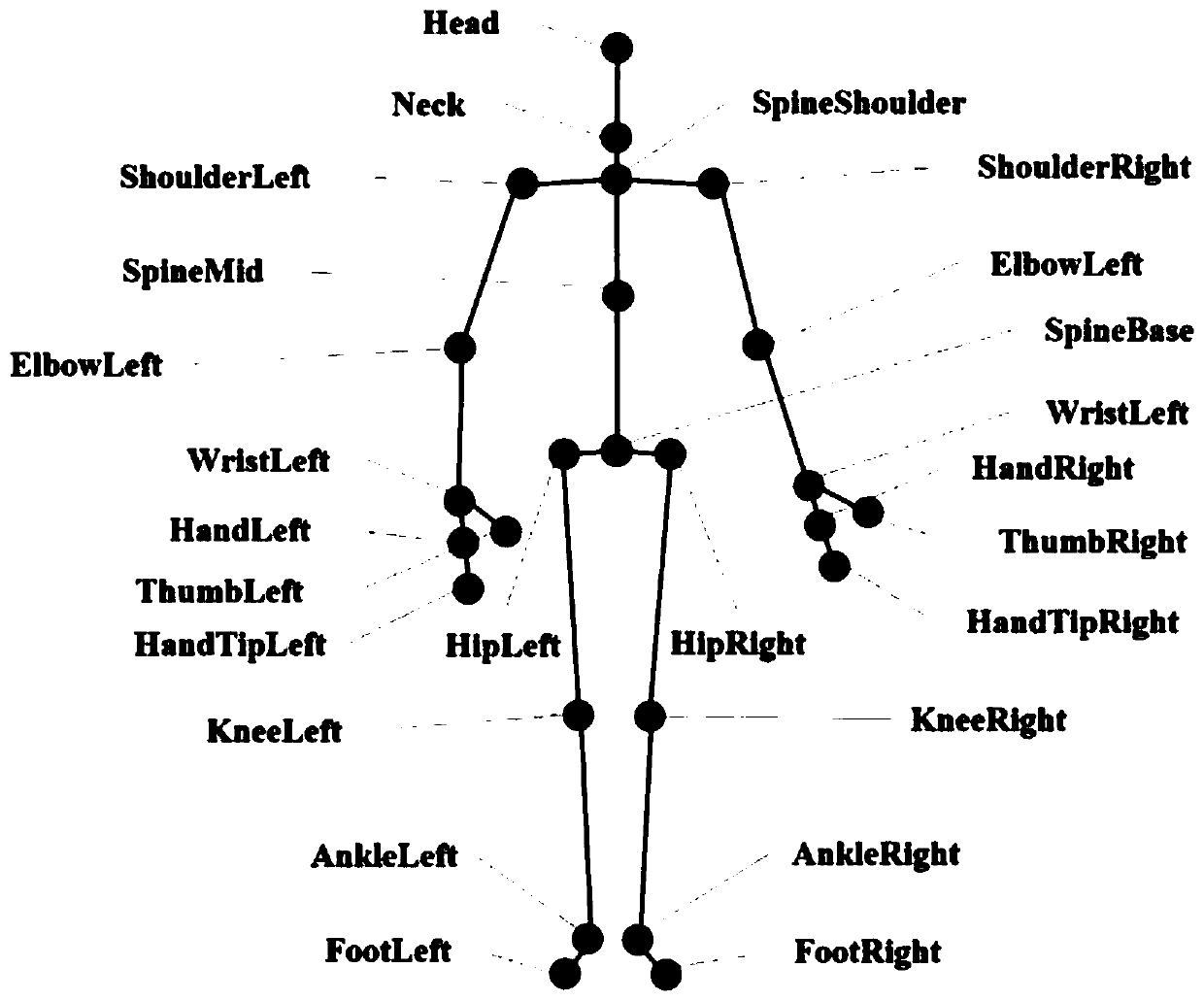
[0047] As an embodiment of the present invention, the present invention provides a robot behavior verification and recognition method based on the GA-BP network. The framework diagram of the robot behavior verification and recognition method based on the GA-BP network is as follows figure 1 As mentioned above, the schematic diagram of the GA-BP network training method is as follows figure 2 As shown, the schematic diagram of the joint points of Kinect is as follows image 3 As mentioned, the specific steps are as follows;
[0048] Step1: collect data;
[0049] For the actions {action_1, action_2, ..., action_N} stored in the robot action...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com