

Hands-on teaching manipulator system and method with imitation learning mechanism
A learning mechanism, a technology of robotic arms, applied in the directions of manipulators, manufacturing tools, etc., to reduce costs, overcome reaction forces, and overcome labor-intensive effects
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0046] The present invention will be further described below in conjunction with accompanying drawing.
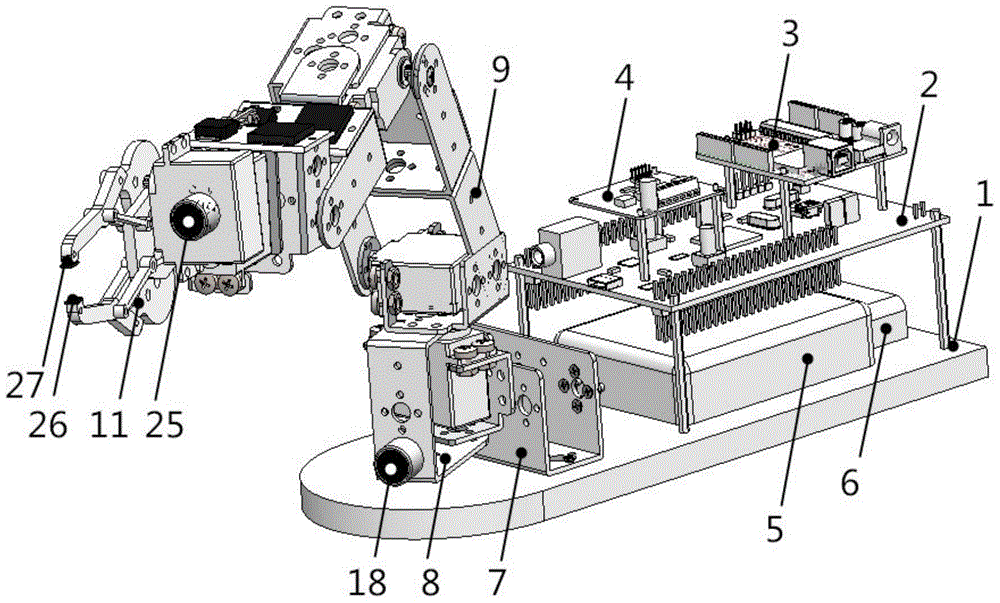
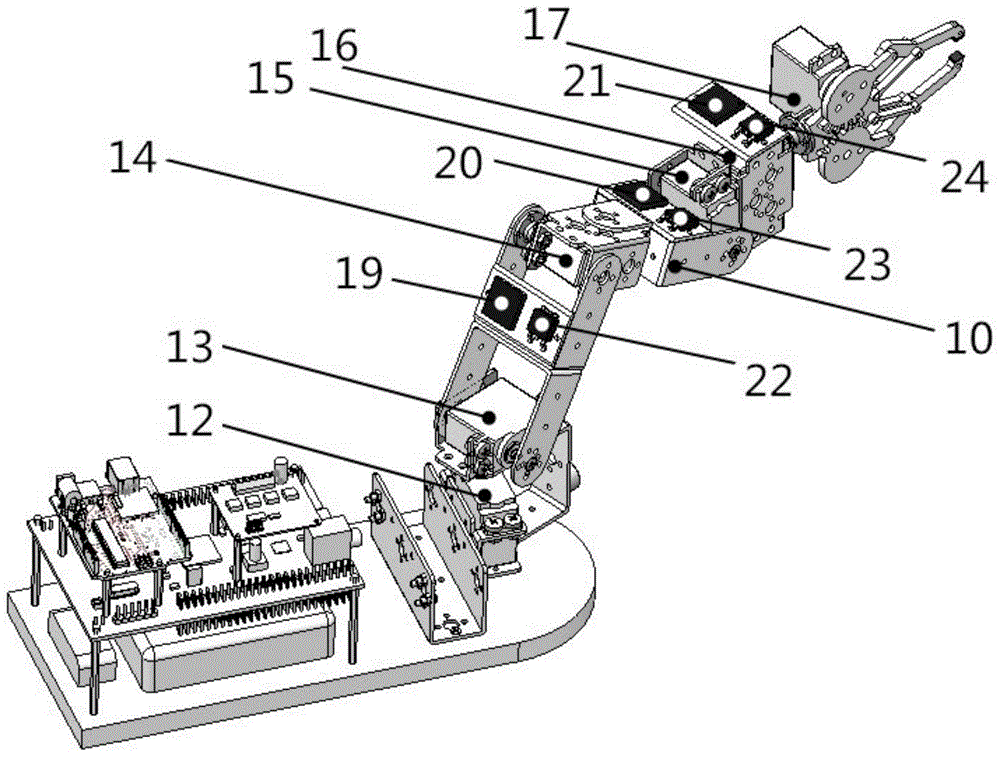
[0047] Figure 1.1-1.2 It is a structural diagram of a hand-held teaching manipulator system with an imitation learning mechanism. It includes a chassis, an arm part consisting of a connecting rod of the robotic arm, a gripper, and a steering gear, a controller, and a battery. Due to the large inertia of the robotic arm as a whole, in order to make the robotic arm system stable and not tilted during the movement, the controller and the The battery is fixed on the other side of the chassis where the arm is attached for balance.
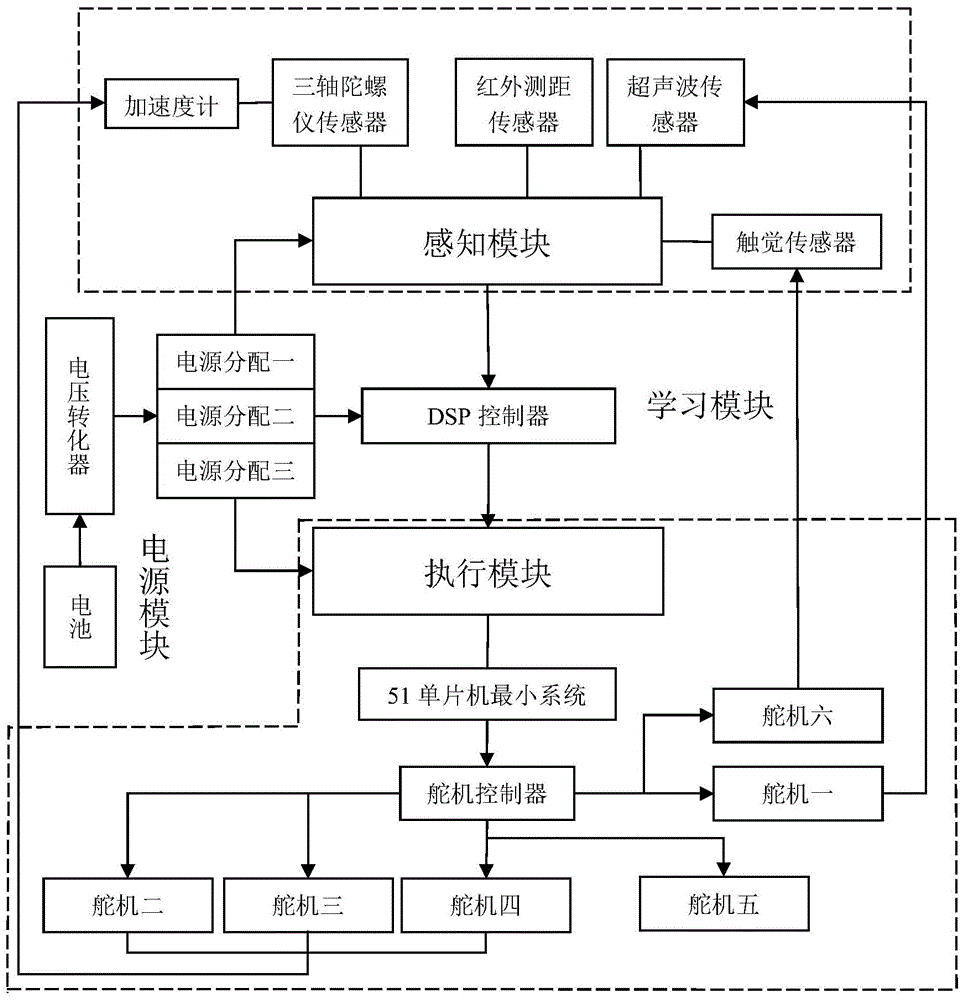
[0048] figure 2 It is a block diagram of the robotic arm system. The robotic arm system consists of four parts, which are perception module, learning module, power module and execution module. The perception module includes a three-axis gyro sensor, accelerometer, infrared ranging sensor, ultrasonic sensor and tactile sensor. The learning modul...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More