Robot for lower-limb rehabilitation training
A technology of rehabilitation training and robotics, applied in passive exercise equipment, massage auxiliary products, physical therapy, etc., can solve the problem of low coupling of exercise space, difficulty in improving lower limb strength and balance, fast and slow muscle strength of muscle groups, and endurance effects Unsatisfactory effect and other problems, to achieve the effect of reducing the probability of muscle soreness and reducing the degree of delayed onset muscle soreness
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
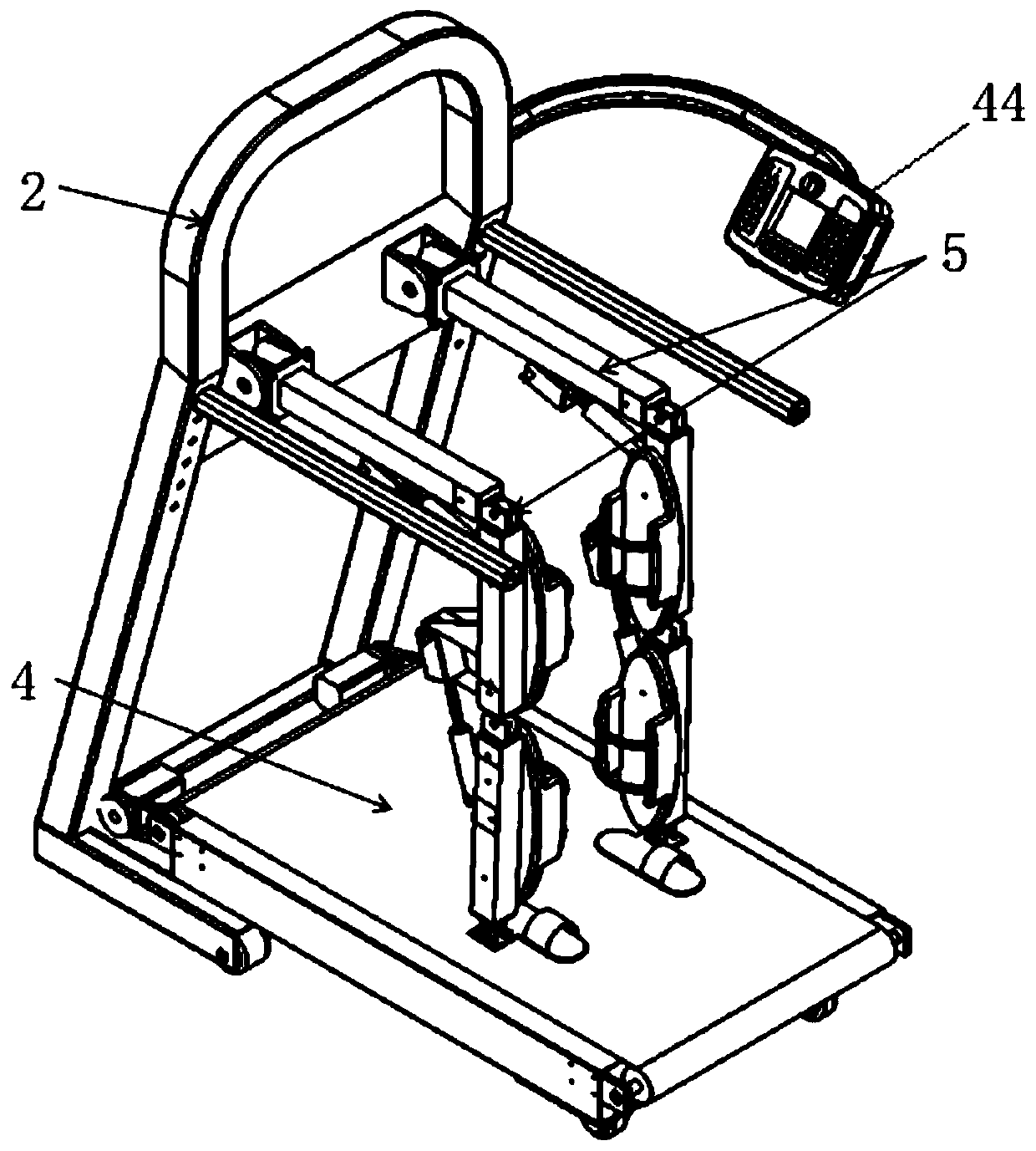
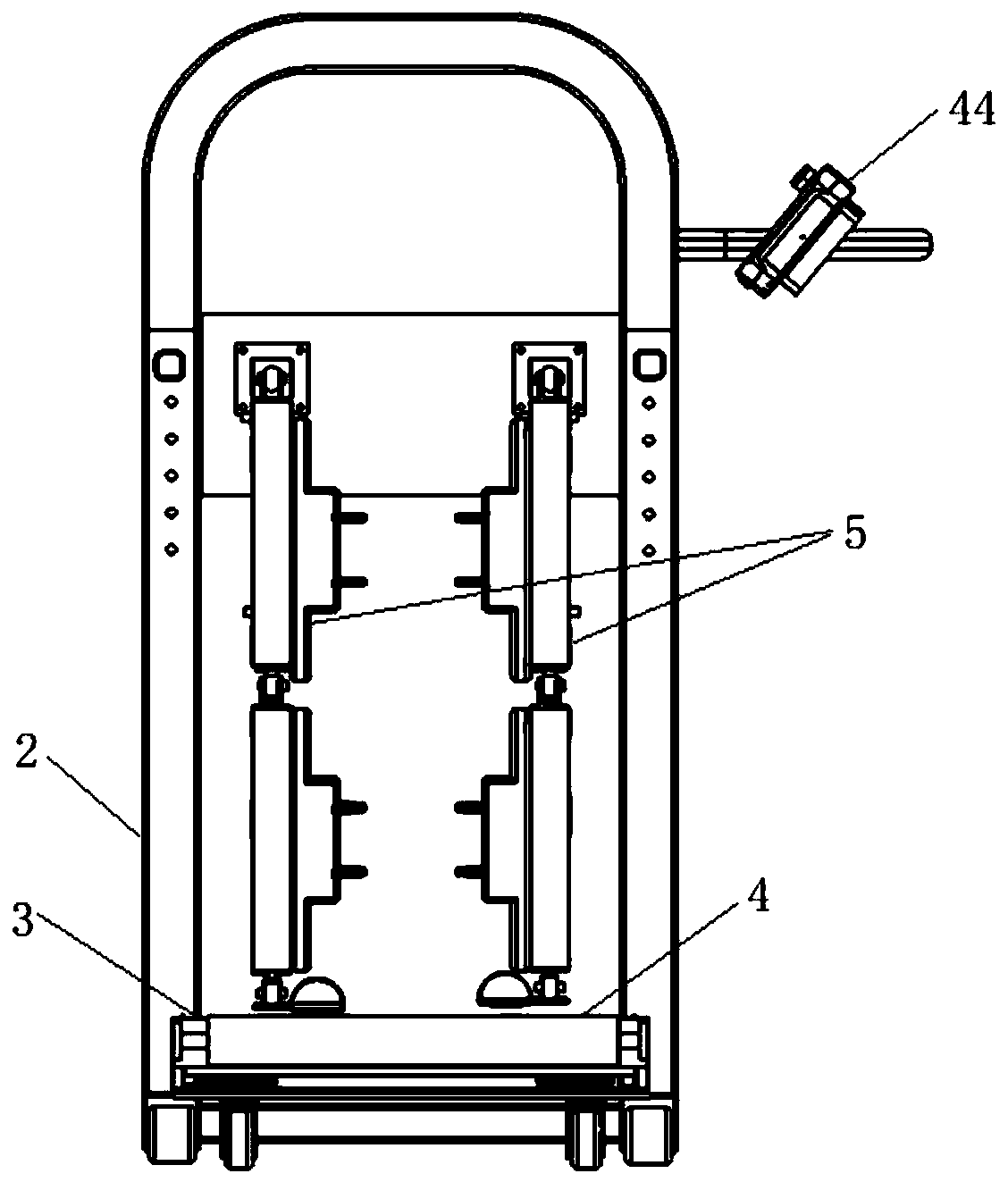
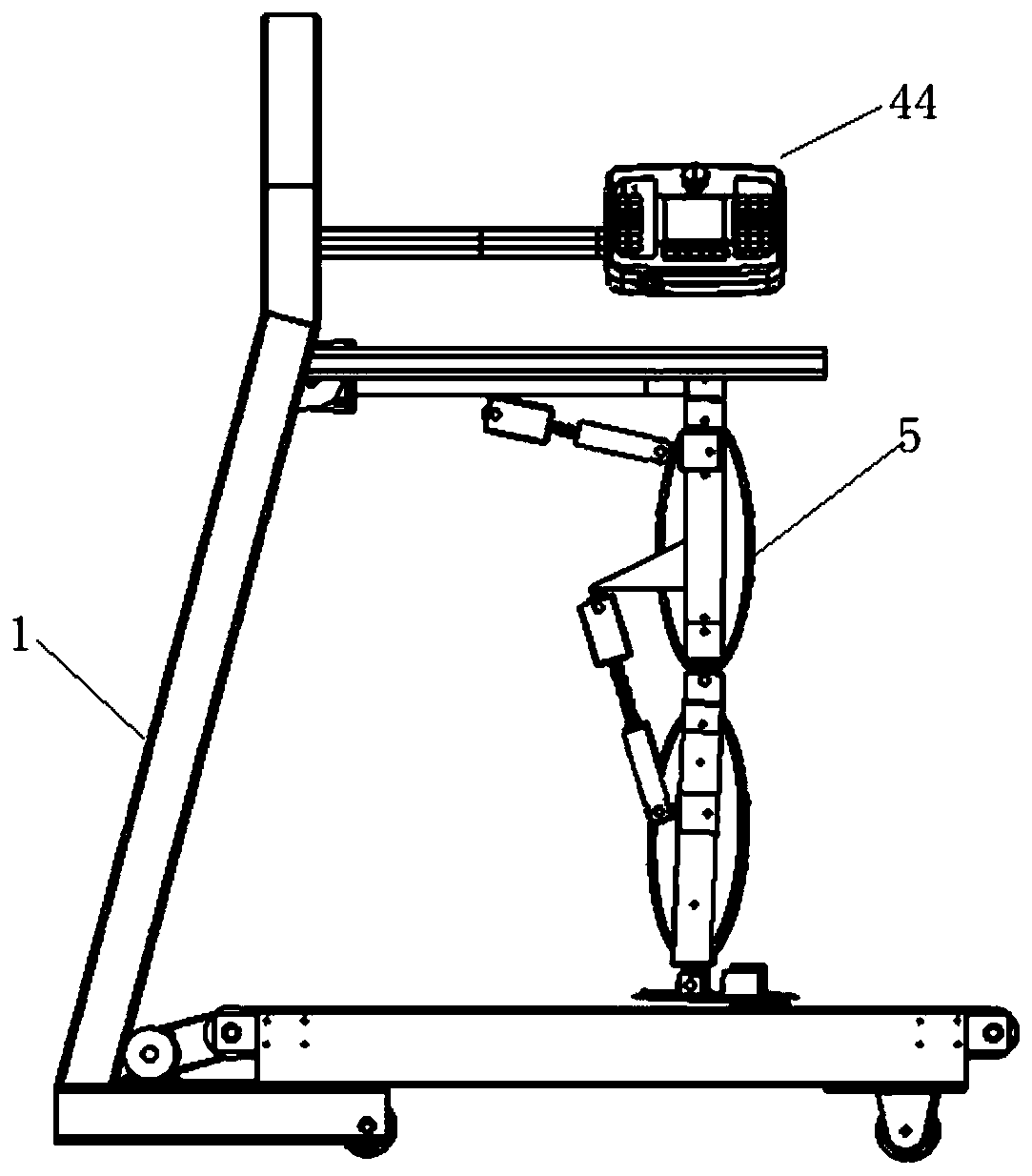
[0138] Such as Figure 1 to Figure 12 As shown, the present invention provides a lower limb rehabilitation training robot, comprising:
[0139] A running device 1 includes a frame 2, a running board 3, a running belt 4 and a running belt driving assembly;
[0140] The lower limb movement device 5 is arranged above the running board 3 and is connected with the frame 2, including a thigh support fixing component, a calf support fixing component, a foot support fixing component and a lower limb movement driving component;
[0141] The vibrating device 6 is installed below the running board 3 by the vibrating device base plate 7, the vibrating device base plate 7 is provided with a vibrating mechanism 8, and the vibrating mechanism 8 comprises:
[0142] slide rail 9;
[0143] The slider 10 is slidably matched with the slide rail 9;
[0144] The voice coil motor mounting plate 11 is arranged on the upper side of the slider 10, and the voice coil motor mounting plate 11 is provid...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com