Third-shaft and fourth-shaft joint structure of SCARA robot and SCARA robot
A technology of robots and shaft joints, applied in the directions of manipulators, program-controlled manipulators, joints, etc., can solve the problems of insufficient space of the manipulator, difficulty in heat dissipation, reduction of transmission accuracy and transmission efficiency, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
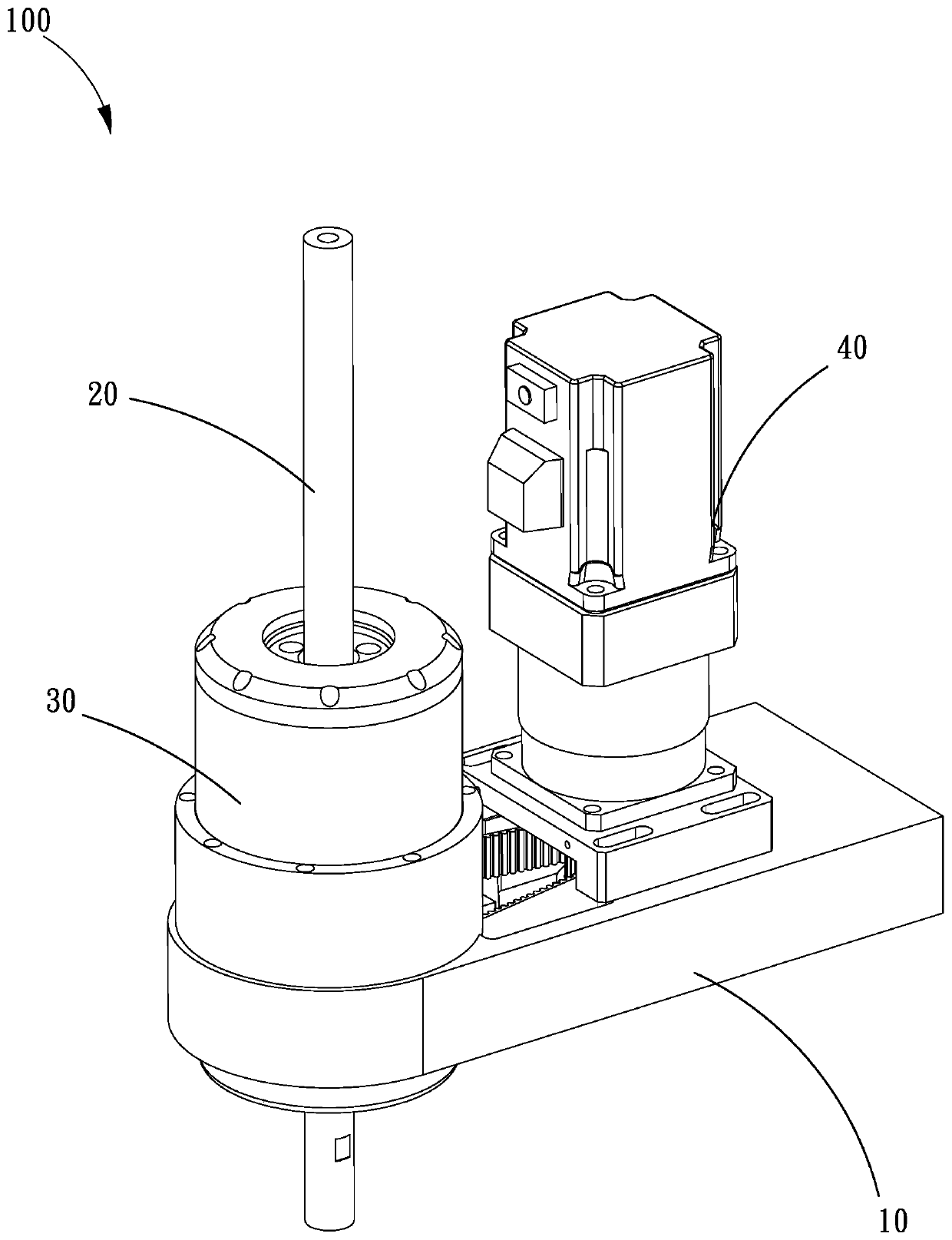
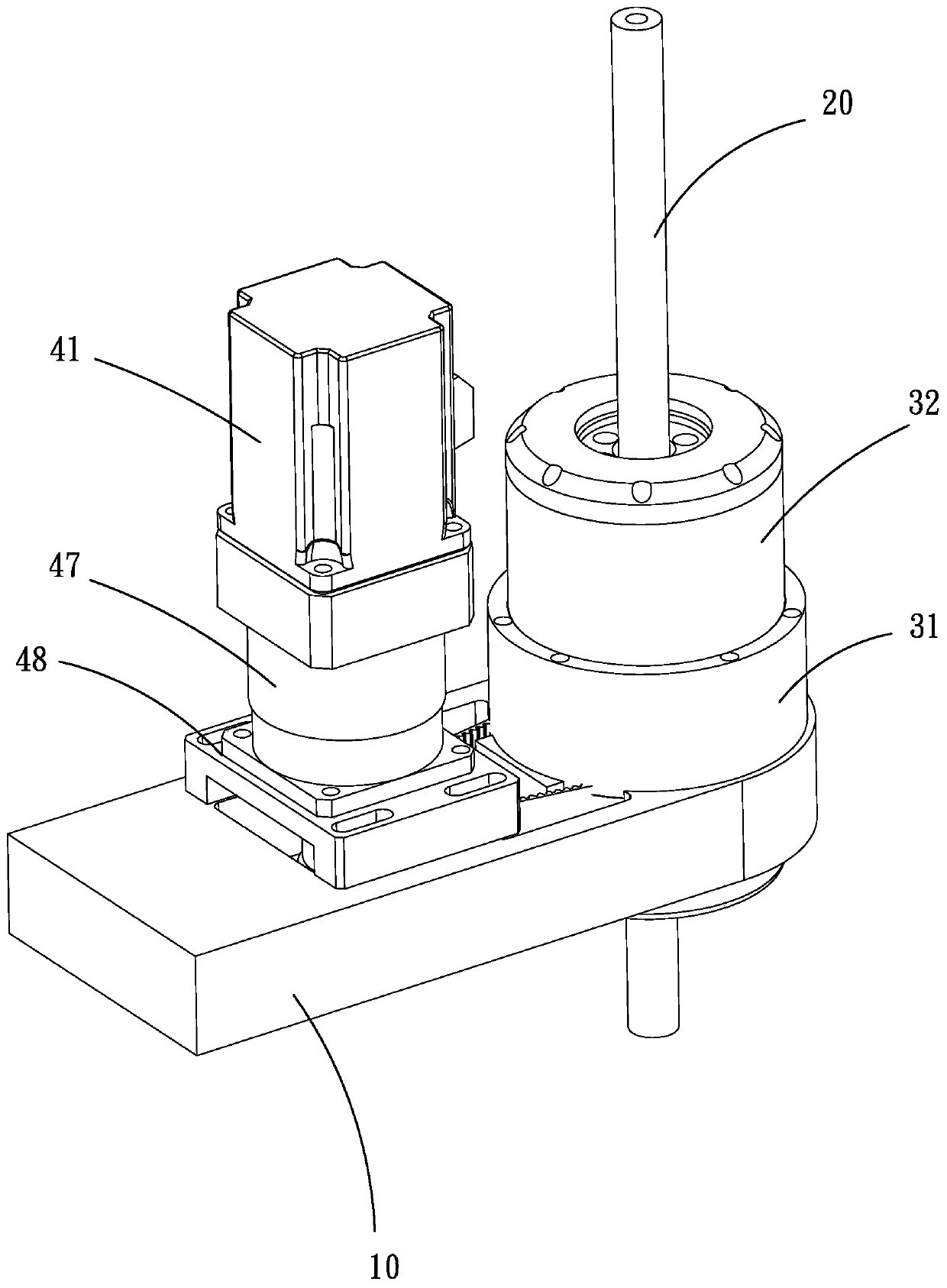
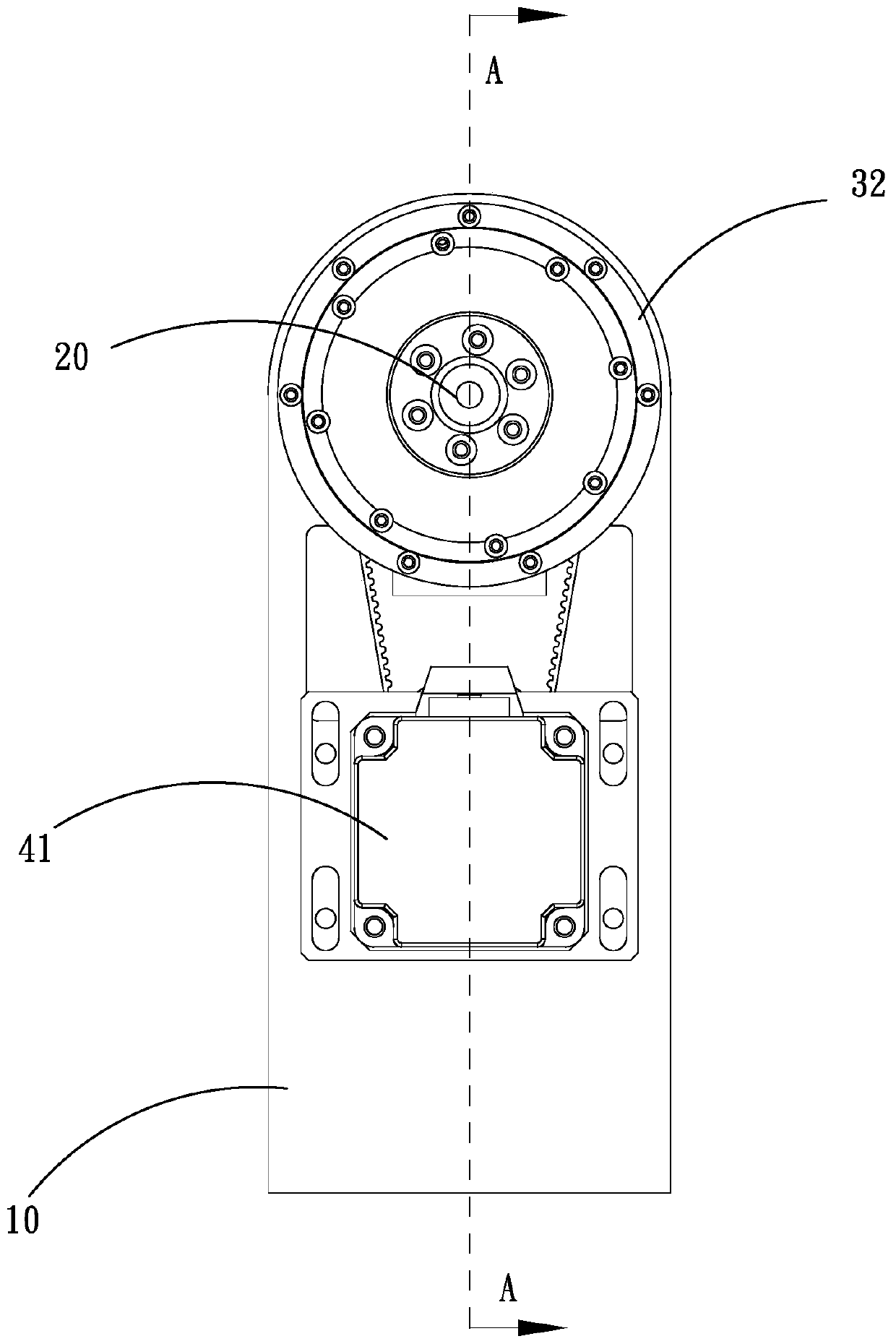
[0046] Such as Figure 1 to Figure 5 As shown, it is the three-axis and four-axis joint structure 100 of the SCARA robot according to the first embodiment of the present invention.
[0047] Such as Figure 1 to Figure 3 As shown, the three- and four-axis joint structure 100 of the SCARA robot includes: a second mechanical arm 10 , a ball spline shaft 20 vertically passing through the second mechanical arm 10 , and a second mechanical arm 10 installed on the second mechanical arm 10 The three-axis driving unit 30 and the fourth-axis driving unit 40 installed on the second mechanical arm 10 . Wherein, the second mechanical arm 10 is used to carry the ball spline shaft 20 , the third axis driving unit 30 , and the fourth axis driving unit 40 , and can be articulated with the first mechanical arm of the SCARA robot when in use. The ball spline shaft 20 is used to connect the gripper of the SCARA robot, and the ball spline shaft 20 can realize the screw structure required by the ...
Embodiment 2
[0066] Such as Figure 6 and Figure 7 As shown, it is the three-axis and four-axis joint structure 100 of the SCARA robot according to the second embodiment of the present invention.
[0067] The difference between the present embodiment and the first embodiment is that in the three- and four-axis joint structure 100 of the SCARA robot of the present embodiment, the third drive unit 30 is also provided with an encoder 36 connected to the direct drive motor 32 . The encoder 36 is ring-shaped as a whole and includes: a code disc shaft 361 connected to the motor shaft 322 , a hollow code disc 362 sleeved on the code disc shaft 361 , and a reading head mount 363 connected to the hollow code disc 362 . The code wheel shaft 361 is sleeved on the ball spline shaft 20 and extends from the central opening of the upper cover 352 to the outside. The hollow code wheel 362 is located at the part where the code wheel shaft 361 extends to the outside of the upper cover 352 , and the readi...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More