Automatic control system of industrial robot
An industrial robot and automatic control technology, which is applied in the direction of program control manipulator, manipulator, manufacturing tools, etc., can solve the problems of inability to meet the real-time and reliability requirements of high-end numerical control devices, low degree of automation, poor expandability, etc., to achieve improved Stability and positioning accuracy, improving real-time performance and accuracy, improving intelligence and efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0057] In order to further understand the content, features and effects of the present invention, the following examples are given, and detailed descriptions are given below with reference to the accompanying drawings.
[0058] The structure of the present invention will be described in detail below in conjunction with the accompanying drawings.
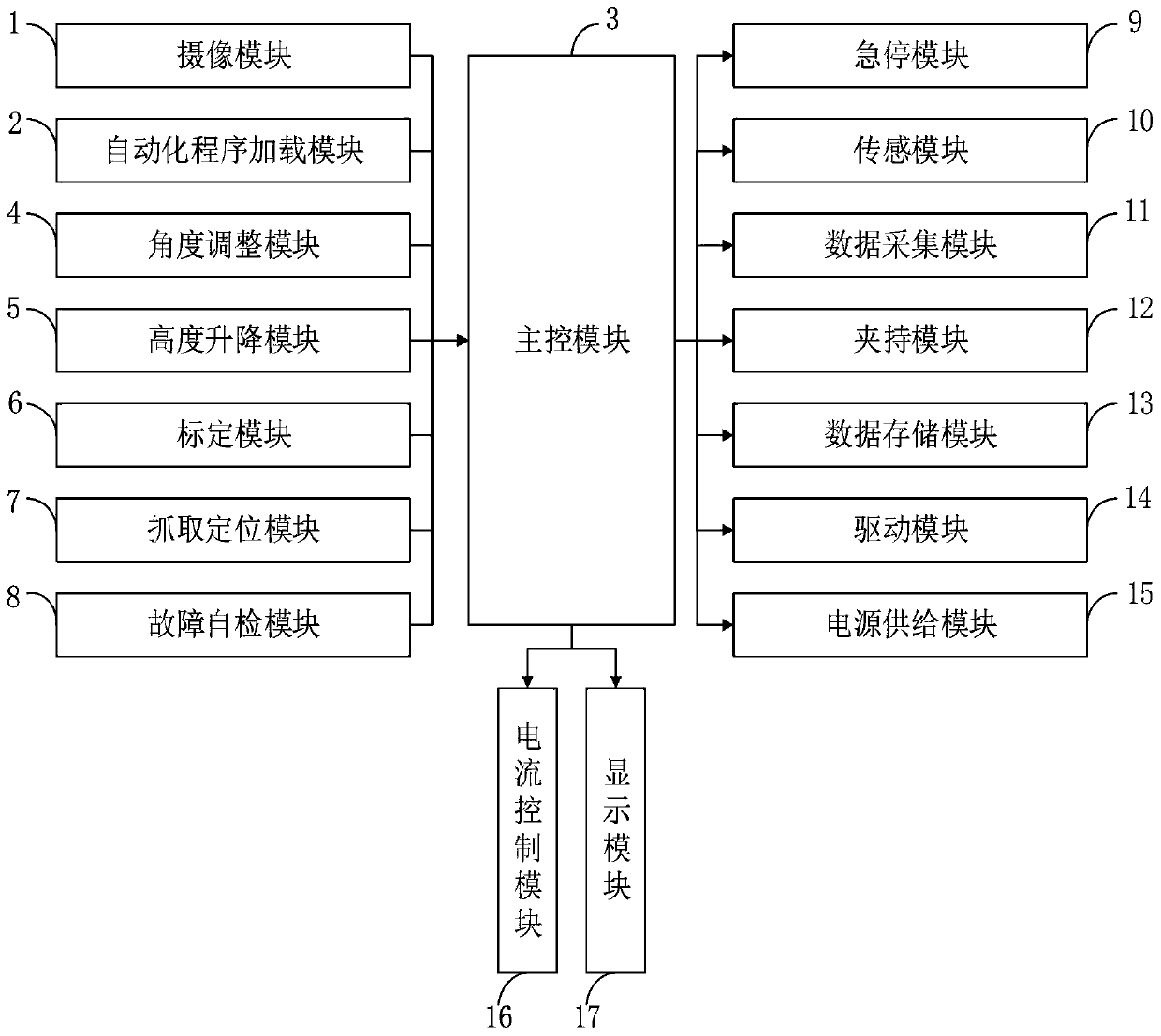
[0059] Such as figure 1 As shown, the automatic control system of the industrial robot provided by the embodiment of the present invention includes: a camera module 1, an automatic program loading module 2, a central control module 3, an angle adjustment module 4, a height lifting module 5, a calibration module 6, and a grasping and positioning module 7. Fault self-inspection module 8, emergency stop module 9, sensing module 10, data acquisition module 11, clamping module 12, data storage module 13, drive module 14, power supply module 15, current control module 16, display module 17 .
[0060] The camera module 1 is connected with...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More