

Robot mapping method and device, robot and storage medium
A robot and map technology, applied in the field of robots, can solve problems such as unstable positioning and mapping, inaccurate robot positioning data, etc., and achieve the effects of reducing inability to locate, accurate maps, and reducing cumulative errors
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0027] The technical solutions in the embodiments of the present application will be described below with reference to the drawings in the embodiments of the present application.
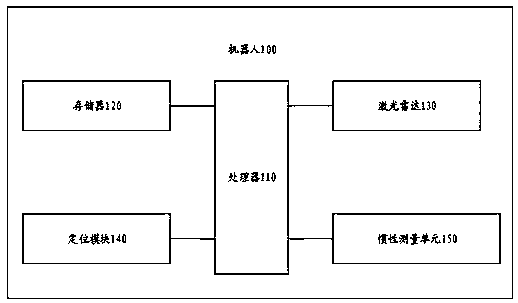
[0028] see figure 1 , is a schematic structural block diagram of a robot 100 in a robot mapping method provided in an embodiment of the present application. Structurally, the robot 100 may include a processor 110 and a memory 120 .
[0029] The processor 110 and the memory 120 are electrically connected directly or indirectly to realize data transmission or interaction. For example, these components may be electrically connected to each other through one or more communication buses or signal lines. The robot mapping device includes at least one software module that can be stored in the memory 120 in the form of software or firmware (Firmware) or solidified in the operating system (Robot Operating System, ROS) of the robot 100 . The processor 110 is configured to execute executable modules stored in ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More