

Bounded output control for four-rotor aircraft
A quadrotor aircraft, output control technology, applied in attitude control, non-electric variable control, control/regulation system and other directions, can solve the problems of increasing the initial value selection of the system, poor anti-interference ability, complex controller structure, etc., to achieve simple Controller structure, the effect of strong robustness
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0091] 1, a kind of quadrotor aircraft bounded output control method is characterized in that comprising the following steps:
[0092]1, a kind of quadrotor aircraft bounded output control method is characterized in that comprising the following steps:
[0093] First, define the system coordinate system
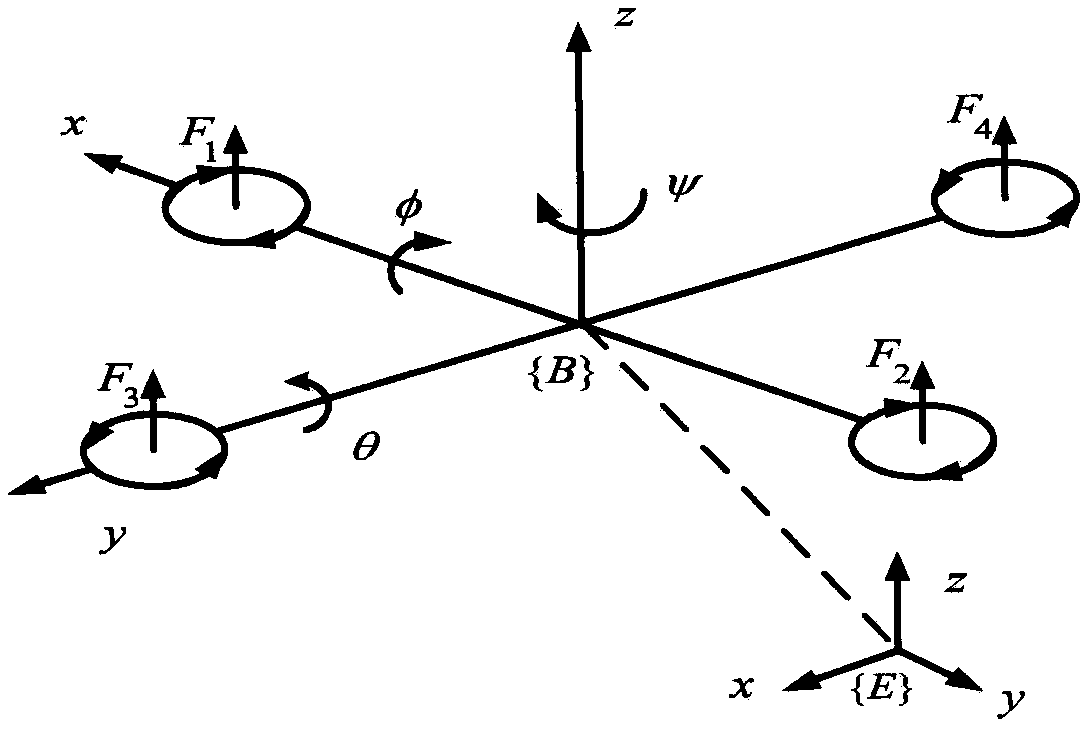
[0094] Two coordinate systems, the ground coordinate system {E} and the body coordinate system {B} of the quadrotor aircraft, are defined. The relative relationship of the coordinate systems is as attached figure 1 shown. The ground coordinate system takes the quadrotor take-off position as the coordinate origin, first let x e The axis points in a certain direction in the horizontal plane, z e The axis is perpendicular to the ground and upwards, and y is determined according to the right-hand rule e axis. The coordinate origin of the body coordinate system is the center of gravity of the body, and x is defined b The positive direction of the axis is the forward directio...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More