

Virtual sensor for vascular interventional surgical robotic system
A robot system and virtual sensor technology, applied in the field of virtual sensors for vascular interventional robotic systems, can solve problems such as friction that cannot be solved, catheter ends cannot be directly measured, disinfection, etc., and achieves strong practicability and researchability. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment
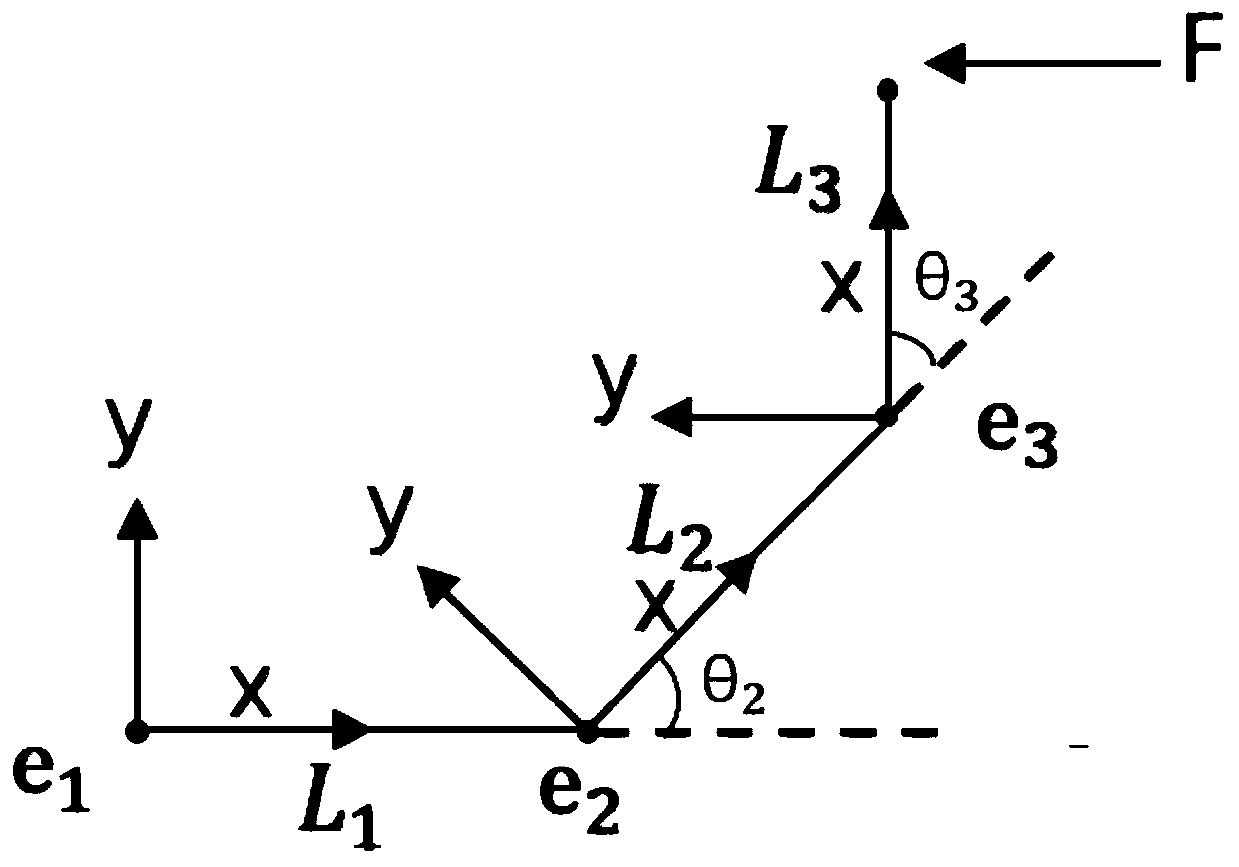
[0029] Embodiment: a kind of virtual sensor for vascular interventional surgery robot system (see figure 1 ), including the image processing part (see figure 2 ) and kinematic model part (see image 3 ); characterized in that it comprises the following steps:
[0030](1) The medical mirror image of blood vessels during the operation is taken by the camera. Since the color of the catheter in the medical mirror image is relatively prominent, it is possible to select an appropriate threshold and distinguish the catheter image first, so as to obtain the degree of damage of the catheter in the vascular interventional operation. The angle signal that changes when the vessel wall collides;
[0031] The camera in the step (1) is a Huawei camera.
[0032] (2) Use local self-adaptive binarization processing to remove the rest of the medical mirror image except the catheter, so as to obtain the image information of the catheter, and then perform edge detection and catheter image fitt...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More