

Unmanned aerial vehicle infrared target real-time detection method
A real-time detection and target detection technology, applied in neural learning methods, computer parts, instruments, etc., can solve the problems of lack of research and practice in target detection methods, and achieve the goal of improving detection capabilities, high-precision target detection, and reducing computational complexity. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
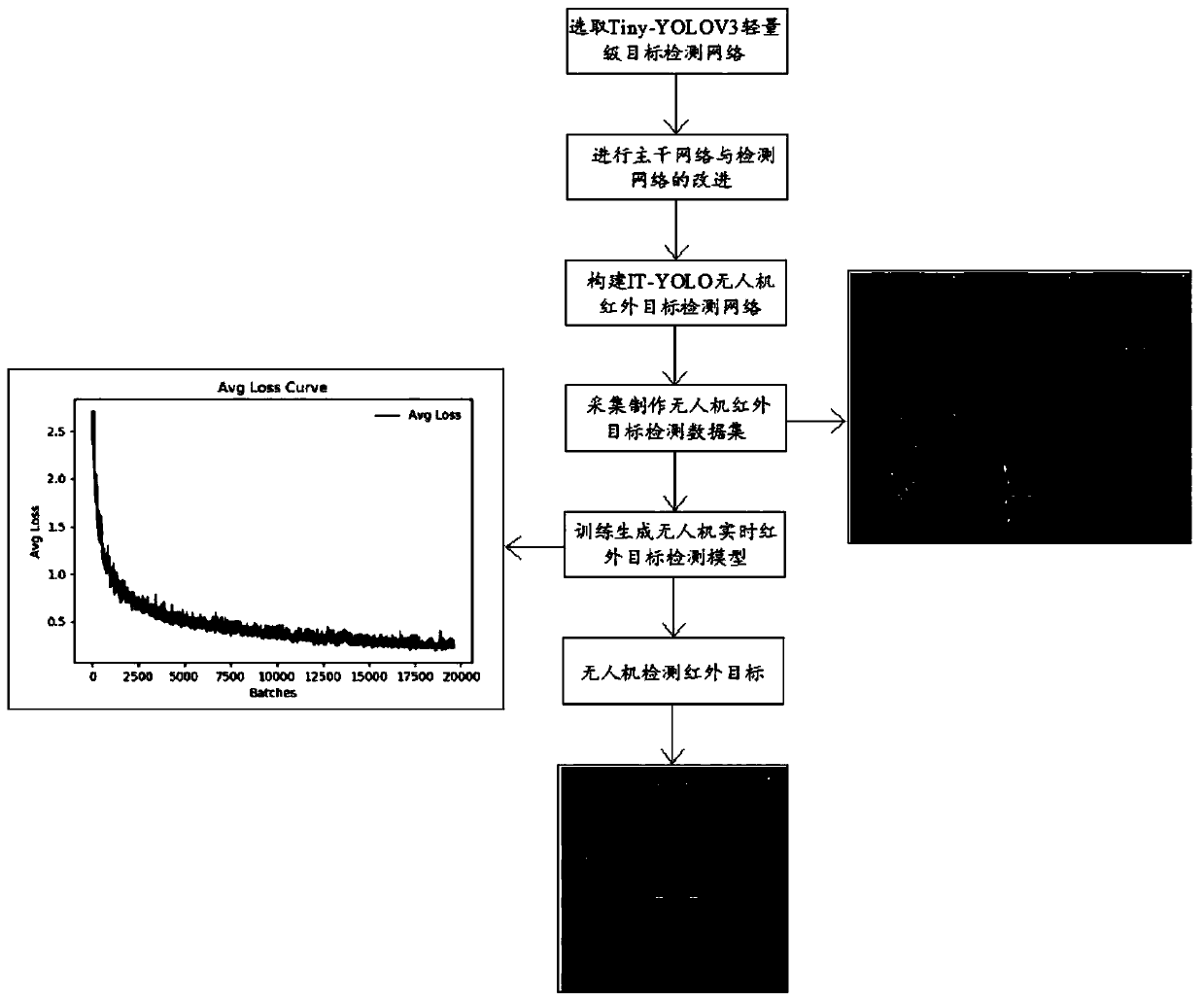
[0042] Such as figure 1 , a method for real-time detection of an infrared target of an unmanned aerial vehicle, comprising the steps of:
[0043] (1) Build IT-YOLO UAV infrared target detection network;
[0044] (2) Collect and make UAV infrared target detection data set;
[0045] (3) Training and generating a real-time infrared target detection model for drones;
[0046] (4) UAV detects infrared targets.
[0047] In the technical solution of this application, on the basis of the Tiny-YOLOV3 lightweight target detection network, the backbone feature extraction network is improved and the network detection layer is replaced, and the IT-YOLO UAV infrared target detection network is constructed. Collect and produce UAV infrared target detection data sets under human-machine vision, train and generate UAV real-time infrared target detection models, which are applied to visible light cameras and ordinary digital night vision of UAVs at night when there is no light, rain and fog,...
Embodiment 2
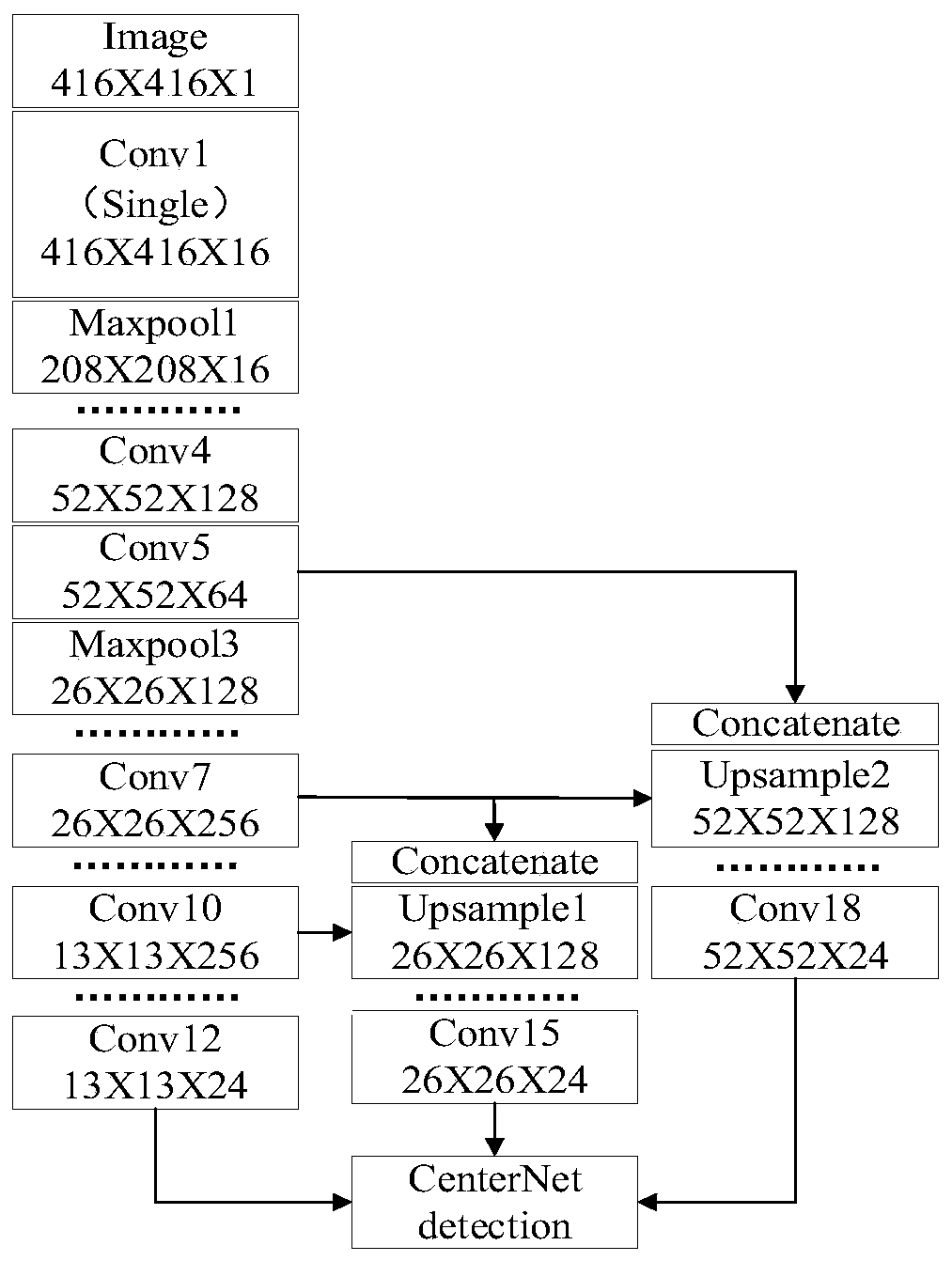
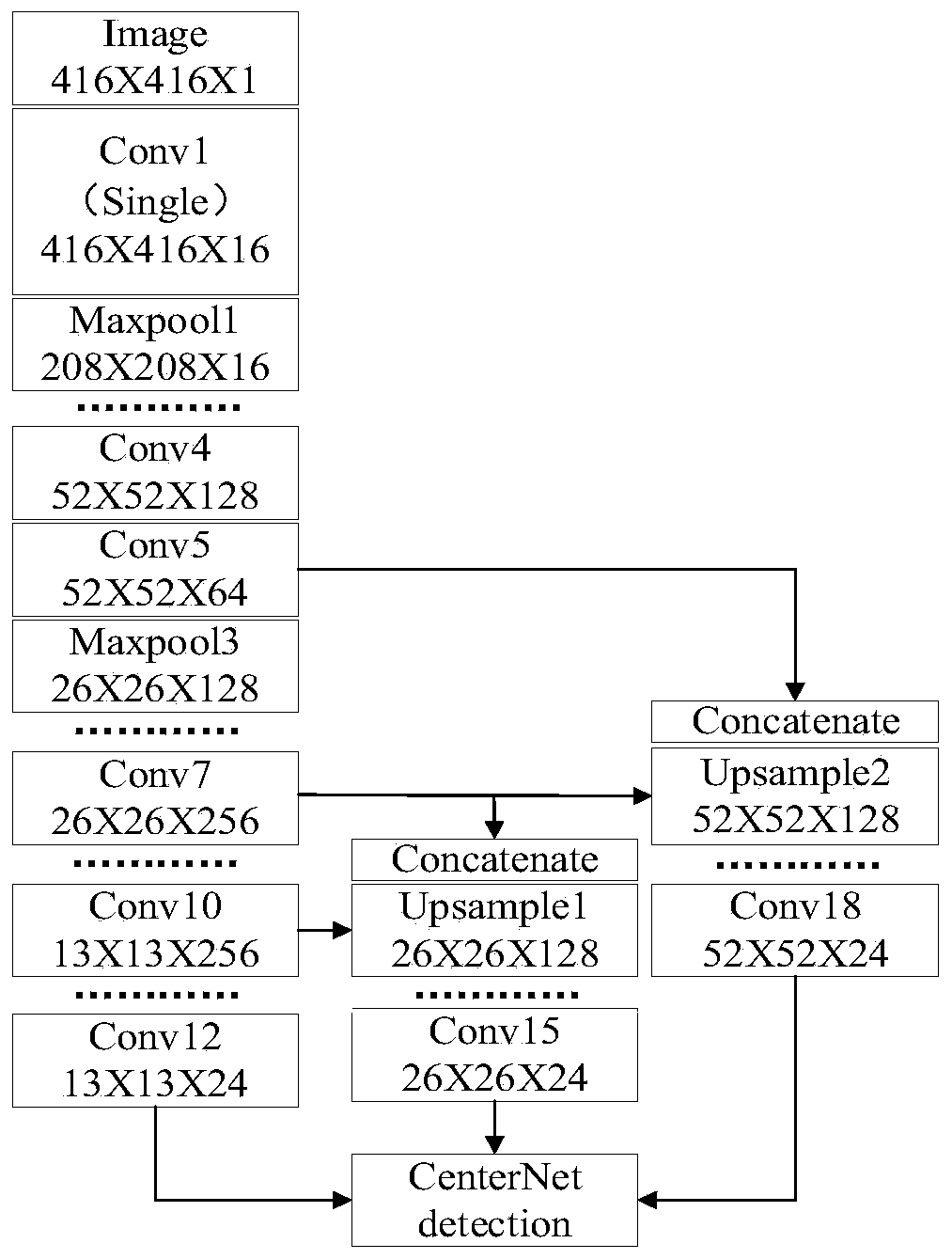
[0049] as attached Figure 1-4 , on the basis of Embodiment 1, the IT-YOLO UAV infrared target detection network in step (1) is to improve the backbone network and detection network on the basis of the Tiny-YOLOV3 lightweight target detection network. The IT-YOLO UAV infrared target detection network adopts the basic structure of Tiny-YOLOV3. According to the characteristics of infrared images, it extracts shallow convolutional layer features to improve the detection ability of small infrared targets. It uses a single-channel convolution kernel to reduce the amount of calculation and detect Part of the detection method based on the CenterNet structure is used to reduce the false detection rate and improve the detection speed.
[0050] For the feature extraction of long-distance low-resolution infrared small targets, the shallow convolution Conv4 layer of the Tiny-YOLOV3 target detection network can more effectively represent the semantic information of infrared small targets, ...
Embodiment 3
[0056] as attached Figure 1-5 , on the basis of Example 1, in the night environment, the infrared thermal imaging platform equipped with the UAV is used to shoot at low altitude and high altitude respectively, and the infrared images that are clear and available for identification and detection are collected from the top-down perspective, and 8000 infrared images are collected. Infrared thermal imaging images of night scenes from the perspective of UAVs are used as UAV infrared target detection datasets.
[0057] Divide the UAV infrared target detection data set into training set and test set according to the ratio of 5:1, use the YOLO-MARK tool to mark the two types of targets to be detected, pedestrians and vehicles; in the model training process, the images in the data set All samples are converted into images of 416×416 pixels. During training, 100 images are used as a batch for small batch training. A batch of images are trained, and the weights are updated once. The dec...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More