

Teleoperation method for unstructured environment based on 5G + AR
An unstructured, teleoperation technology, applied in the field of teleoperation, can solve the problems that the operator cannot be captured, the operator cannot be described, and the interaction efficiency is reduced, so as to reduce the learning cost, improve the reconstruction speed, and ensure the reconstruction accuracy. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
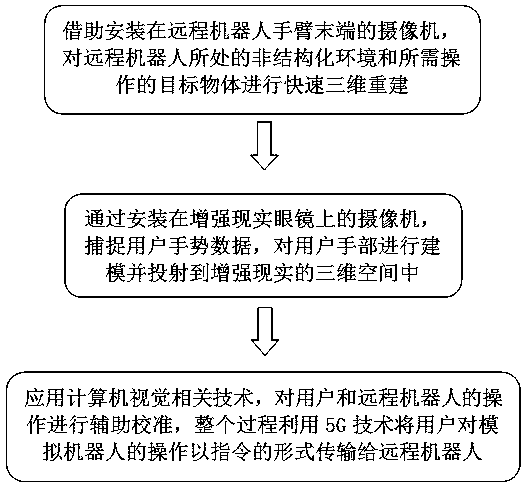
[0028] A 5G+AR-based teleoperation method for unstructured environments such as figure 1 shown, including the following steps:
[0029] S1. With the help of the camera installed at the end of the remote robot arm, fast three-dimensional reconstruction of the unstructured environment in which the remote robot is located and the target object to be operated;
[0030] The fast three-dimensional reconstruction technology is divided into rough reconstruction technology and fine reconstruction technology;
[0031]Since the background objects in the unstructured environment of the remote robot have no significant impact on the completion of the task of the remote robot, the background objects in the unstructured environment are roughly reconstructed; the remote robot moves the camera at the end of the manipulator at a fixed angle, and the camera The point cloud image of the background object in the unstructured environment is captured, and it is constructed in the world coordinate s...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More