

Maneuvering extended target hybrid interactive strong tracking filtering method driven by incomplete measurement data
A technology of strong tracking filtering and extended target, which is applied in the field of mobile extended target hybrid interactive strong tracking filtering, which can solve the problems of difficult target tracking accuracy, channel interference, and inability to meet the requirements of time-sensitive maneuvering target tracking accuracy.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
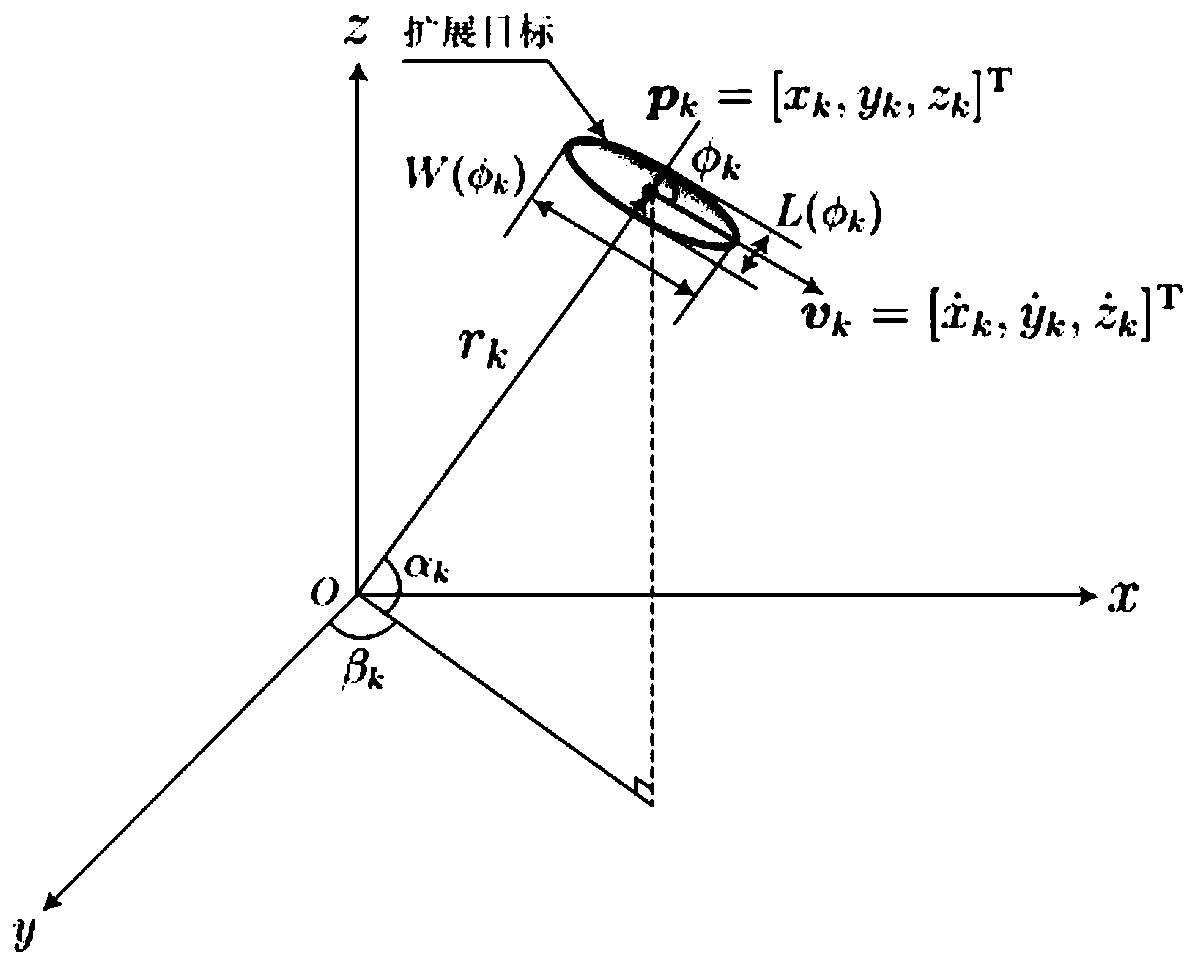
[0132] For the sake of simplicity, consider that the target is maneuvering in the horizontal plane corresponding to a certain height.
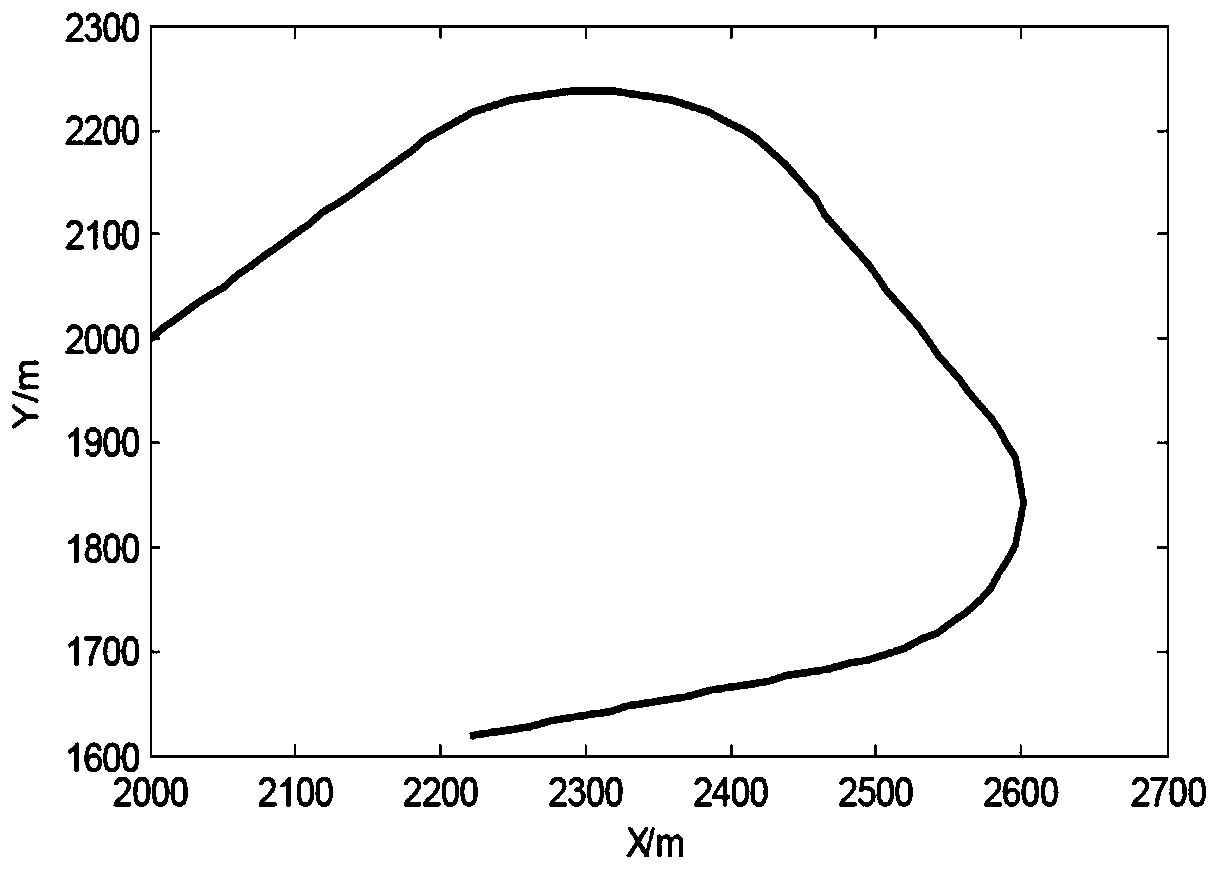
[0133] Assume that the sensor detection cycle T = 1s, and the measurement sensor is still at the origin. at height h 0 = On the horizontal plane of 500m, the initial position of the target is (2000m, 2000m), and the speed is (10m / s, 10m / s). The target performs straight-turn maneuvers on this plane, and the specific movement process is as follows:
[0134] (1) t=0~19T, the target moves in a straight line;
[0135] (2) t=20~40T, the target makes a turning maneuver with an angular velocity of w=5° / s;
[0136] (3) t=41~59T, the target moves in a straight line;
[0137] (4) t=60~80T, the target makes a turning maneuver with an angular velocity of w=5° / s;
[0138] (5) t=81~100T, the target moves in a straight line.
[0139] The motion of the maneuvering extended target is modeled by using the constant-velocity straight line (CV) motion model a...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More