Cross-shaped sliding table driving-type series-parallel spinal surgery robot
The technology of a surgical robot and a cross slide table is applied in the field of a cross slide table-driven hybrid spine surgery robot, which can solve the problem that the spine minimally invasive surgery robot cannot realize the functions of active grinding and drilling, and achieve the effect of easy control.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
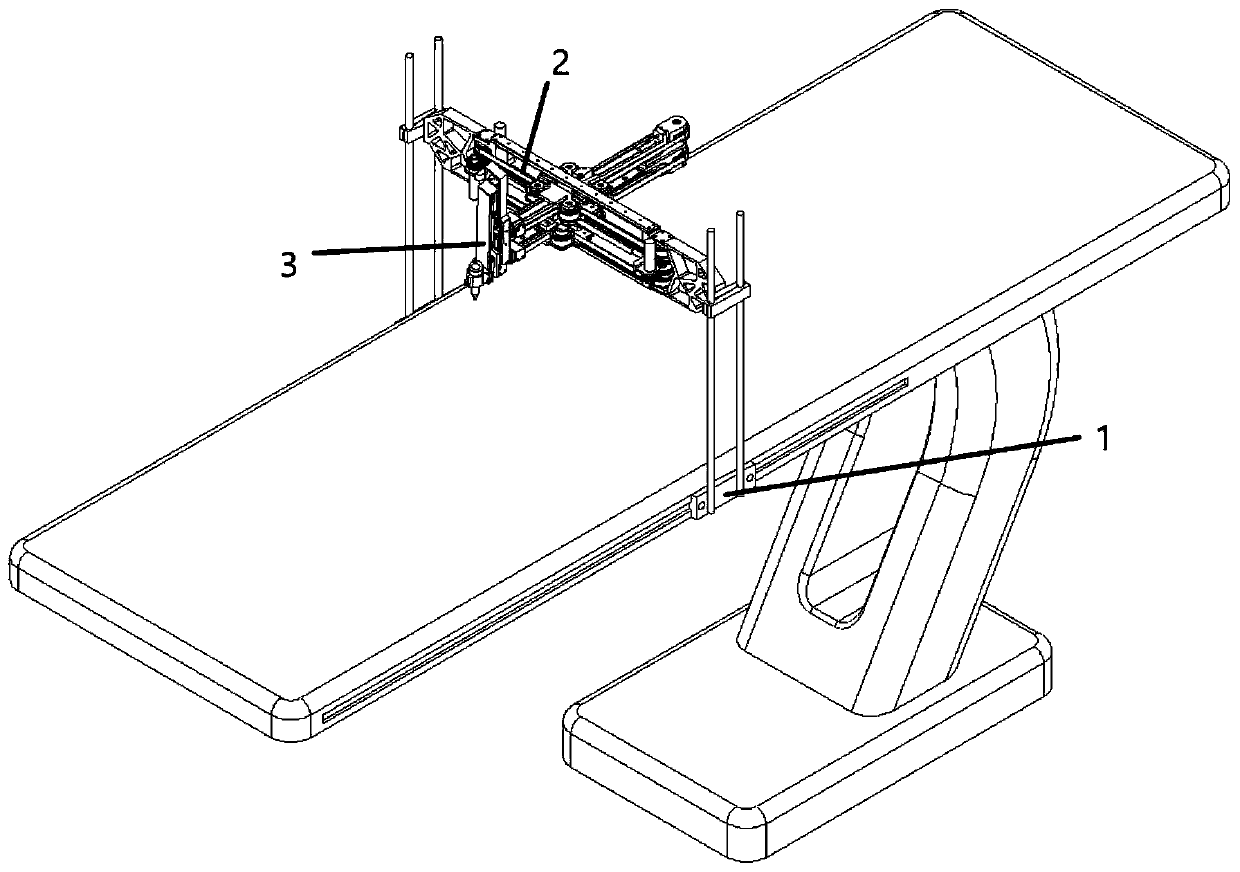
[0030] Specific implementation mode one: the following combination figure 1 This embodiment is described. A cross-slider-driven hybrid spinal surgery robot described in this embodiment includes two sliding bases 1, a four-degree-of-freedom parallel structure 2 and an axial feed structure 3.
[0031] The sliding base 1 includes a slideway and a bracket, and the two slideways are respectively connected to the guide rails on both sides of the operating bed in the length direction, the slideway is connected to the bracket, and the four-degree-of-freedom parallel structure 2 is connected between the two brackets , and straddle the top of the operating table;
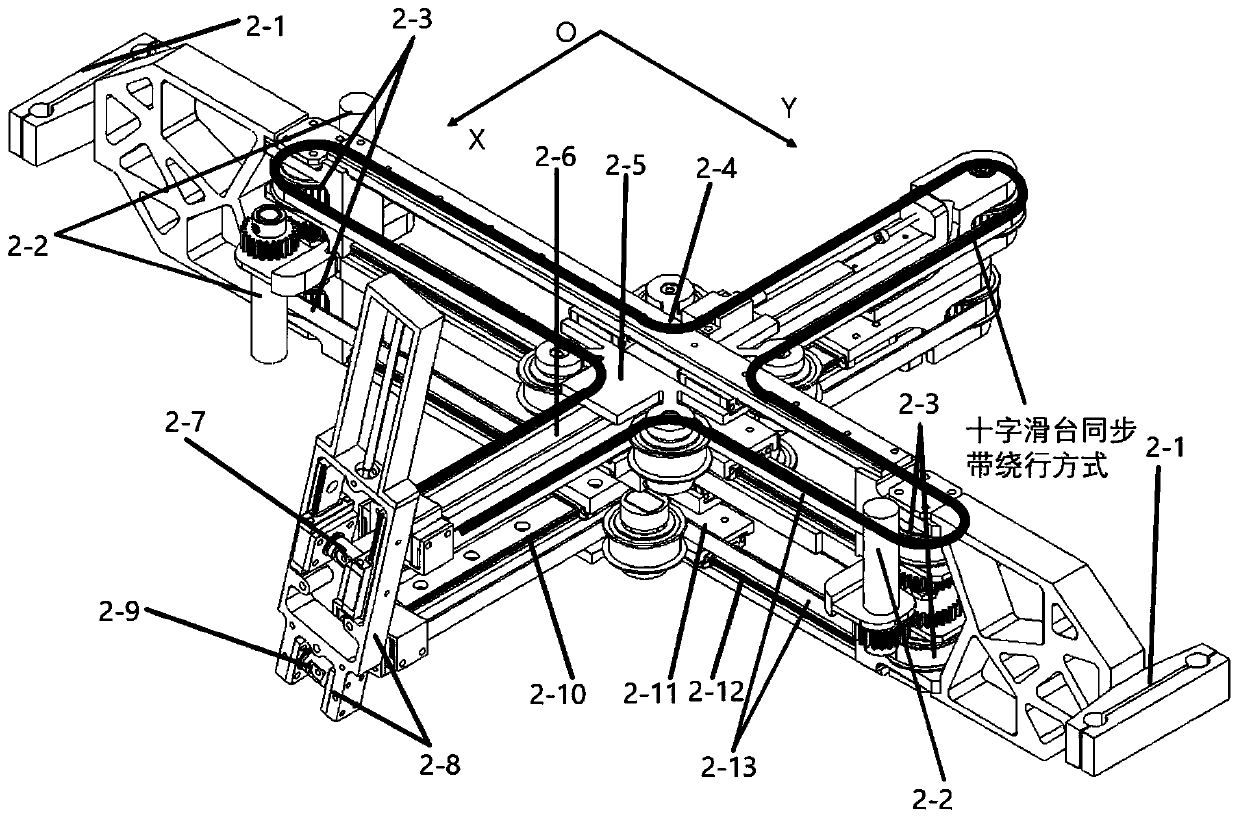
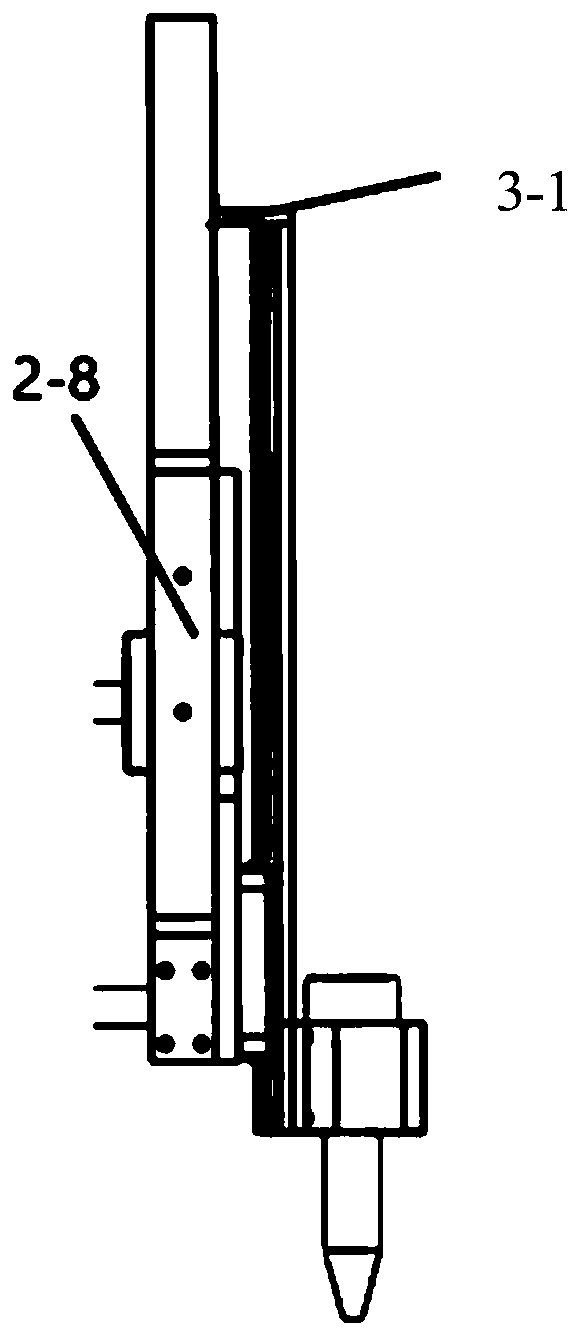
[0032] The four-degree-of-freedom parallel structure 2 includes two sets of upper and lower cross slides driven by synchronous belts. The two sets of cross slides can realize the feed in the XY direction in the coordinate system XYZ; To the feed structure 3, the axial feed structure 3 can realize the pitching and yaw motion ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com