

Multi-directional driving task autonomous management control method suitable for Mars detection
A technology of autonomous management and control methods, applied in the direction of motor vehicles, space navigation equipment, space navigation aircraft, etc., can solve the problems of low on-orbit efficiency, inability to guarantee simultaneous pointing, etc., and achieve the effect of reducing dependence
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
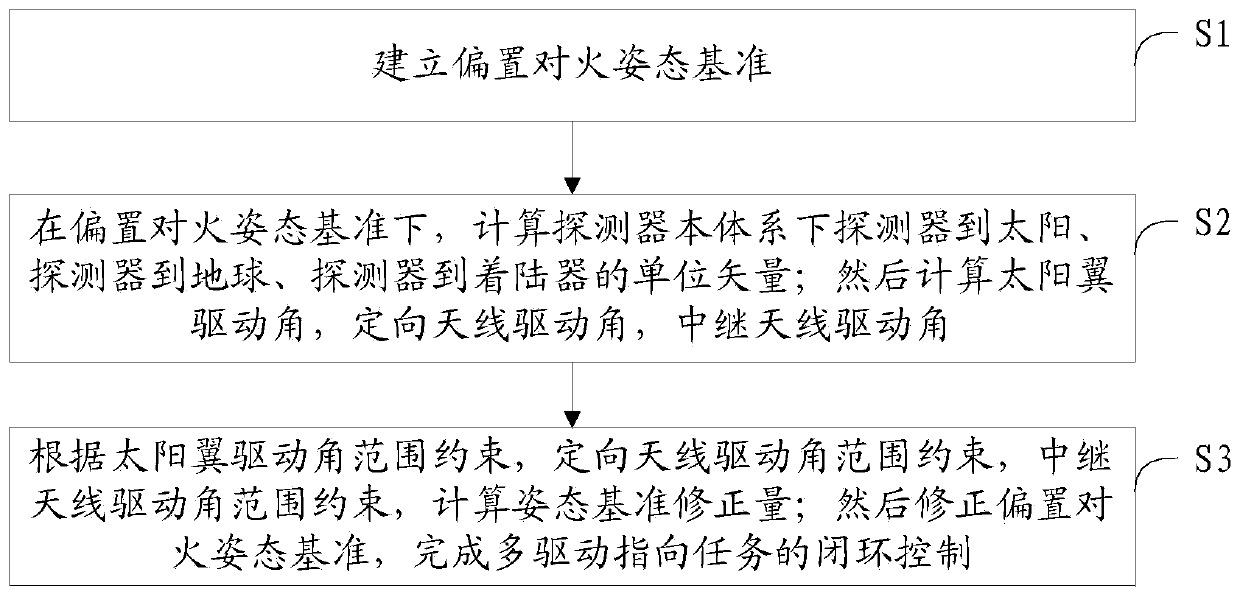
[0033] A multi-directional driving mission dynamic planning method suitable for Mars exploration, used in the orbit flight process, using real-time calculation of physical constraints of different targets, combined with its own driving capabilities, to dynamically plan the attitude reference. The method for dynamic programming of multi-point driving tasks includes the following steps:
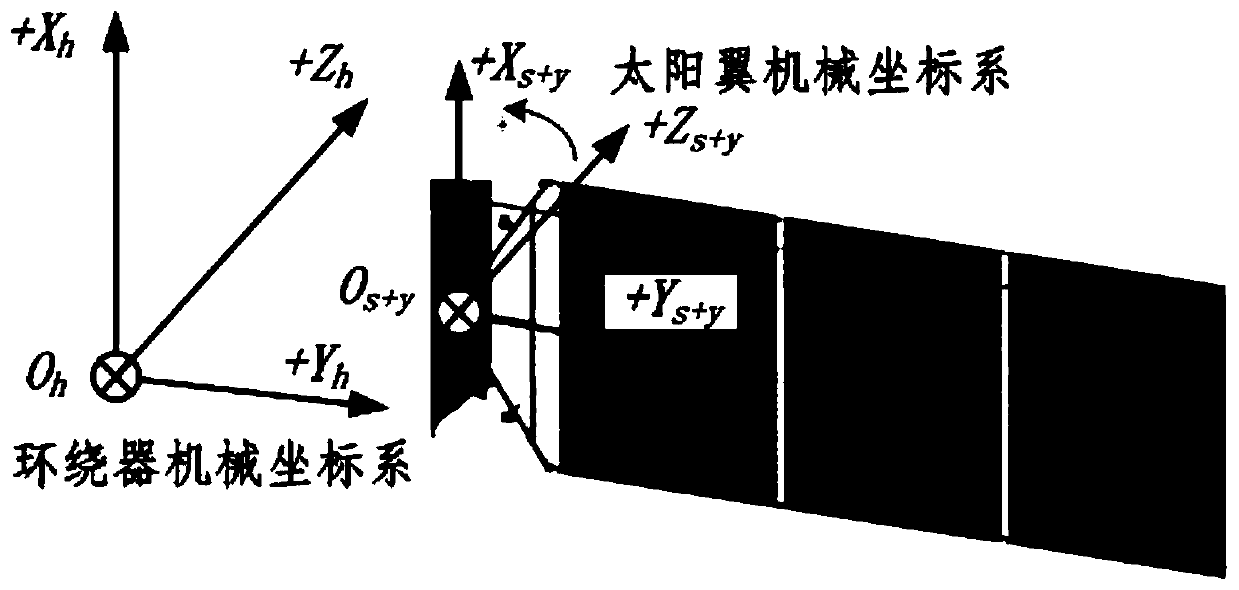
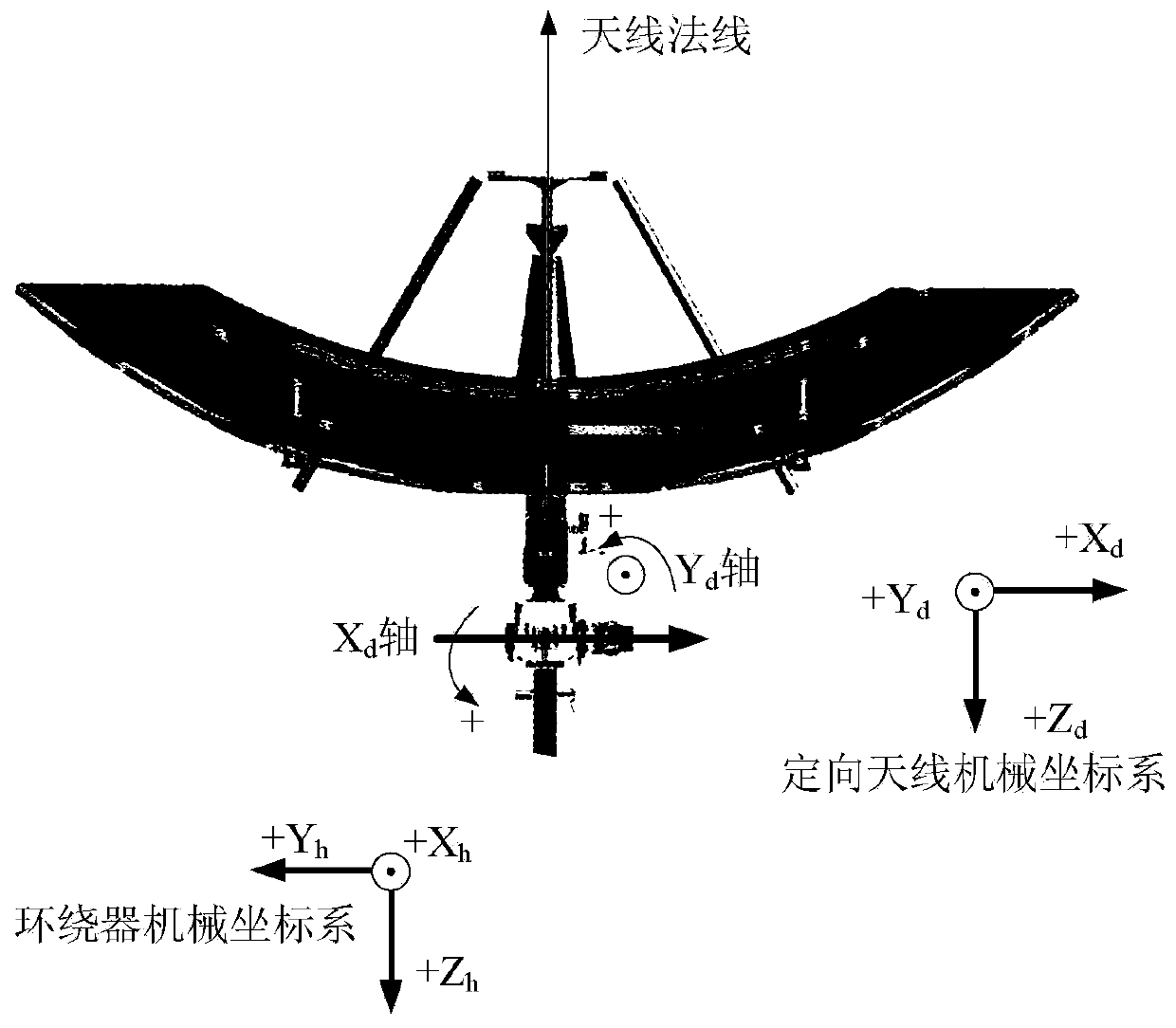
[0034] S1. Define the coordinate system of the Mars rover body as O h x h Y h Z h , positive and negative O along the two wings of the sun wing h Y h Axial installation, and has around O h Y h Axis one-dimensional rotation capability; after the directional antenna is deployed, the electric axis points to negative O h Z h axis, and has around the body O h x h , O h Y h The two-dimensional rotation capability; X relay antenna axis in Y h o h Z h in-plane, with O h Z h The included angle of the shaft is 45°, and it has the ability to wrap around the body O h x h and O h Z h tw...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More