

Joint Calibration Method of Multi-source Sensors Based on Stereo Regular Octagonal Structure
A source sensor and joint calibration technology, which is applied in the field of multi-source data joint calibration in complex agricultural and forestry environments, can solve the problems of increasing the probability of human interference errors, low efficiency, and a small number of calibration reference points, and achieves improved accuracy and data fusion. Improve accuracy and efficiency, and achieve the effect of effective fusion
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0093] Preferred embodiments of the present disclosure will be described in more detail below with reference to the accompanying drawings. Although preferred embodiments of the present disclosure are shown in the drawings, it should be understood that the present disclosure can be embodied in various forms and should not be limited to the embodiments set forth herein. Rather, these embodiments are provided so that this disclosure will be thorough and complete, and will fully convey the scope of the disclosure to those skilled in the art.
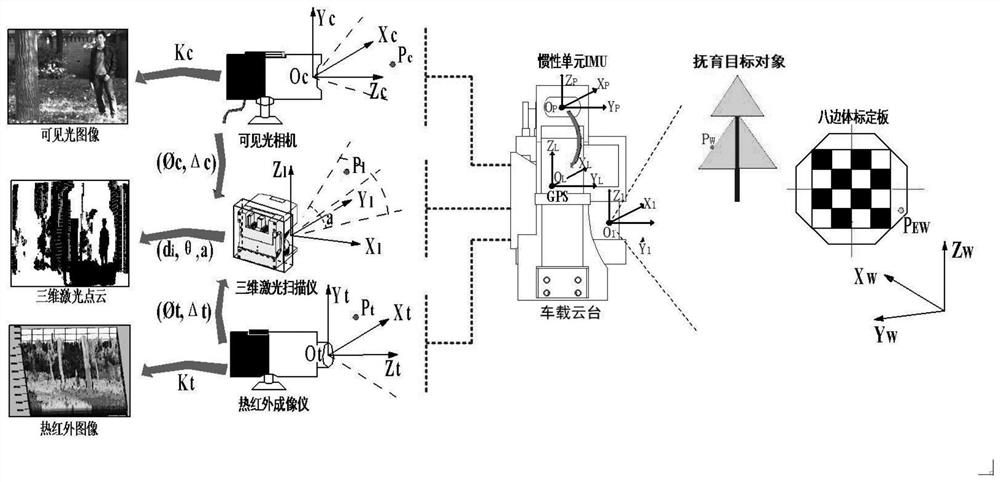
[0094] attached figure 1 A schematic diagram of a principle of a multi-source sensor joint calibration method based on a stereo regular octagon structure according to an exemplary embodiment is shown.
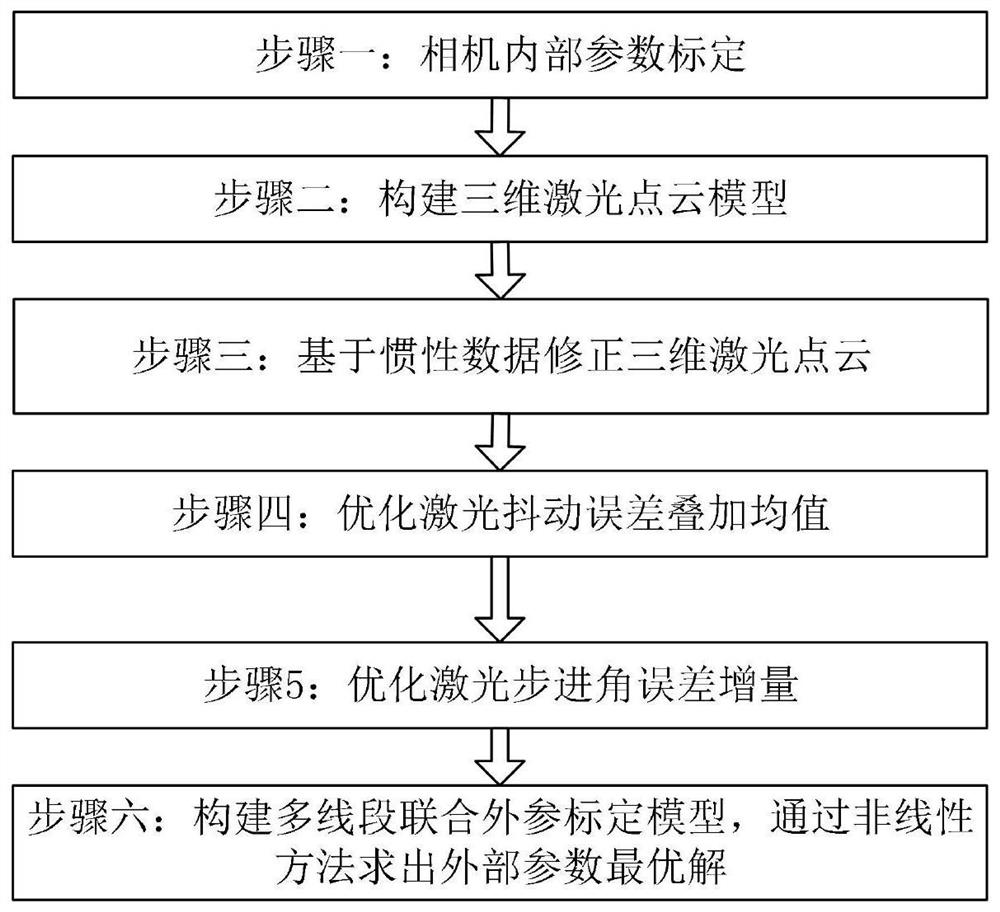
[0095] as attached figure 2 As shown, the multi-source sensor joint calibration method based on the three-dimensional regular octagon structure of the exemplary embodiment includes the following steps:
[0096] Step 1, camera internal param...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More