

Underwater robot cooperative target searching method based on global information transmission mechanism
An underwater robot and global information technology, applied in the direction of instruments, non-electric variable control, height or depth control, etc., can solve problems such as not being suitable for long-term search tasks, complex information distribution of search maps, and low search efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0057] Hereinafter, specific embodiments of the present invention will be further described in conjunction with the accompanying drawings.
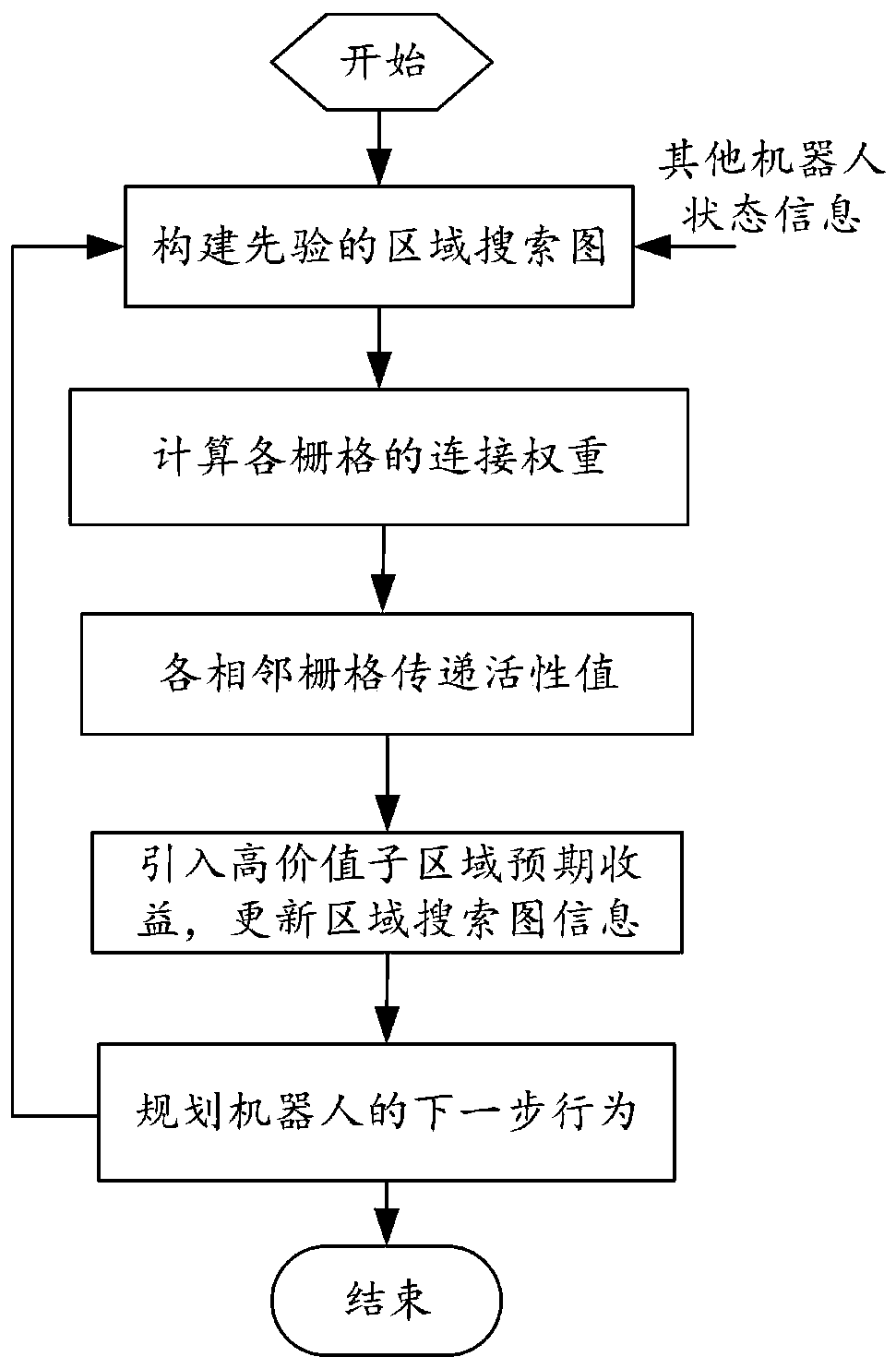
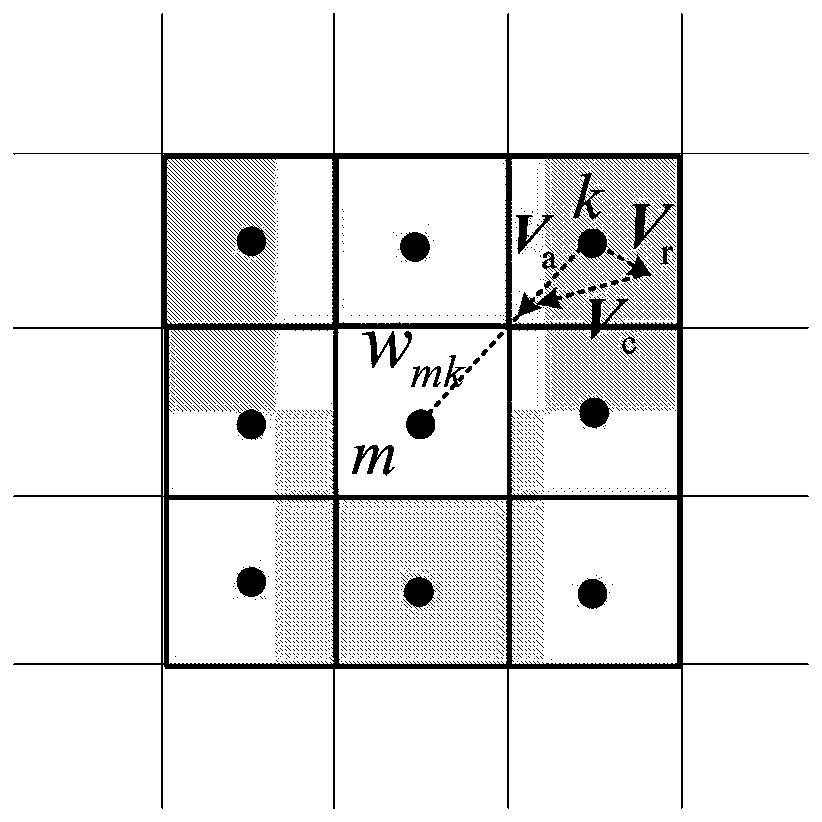
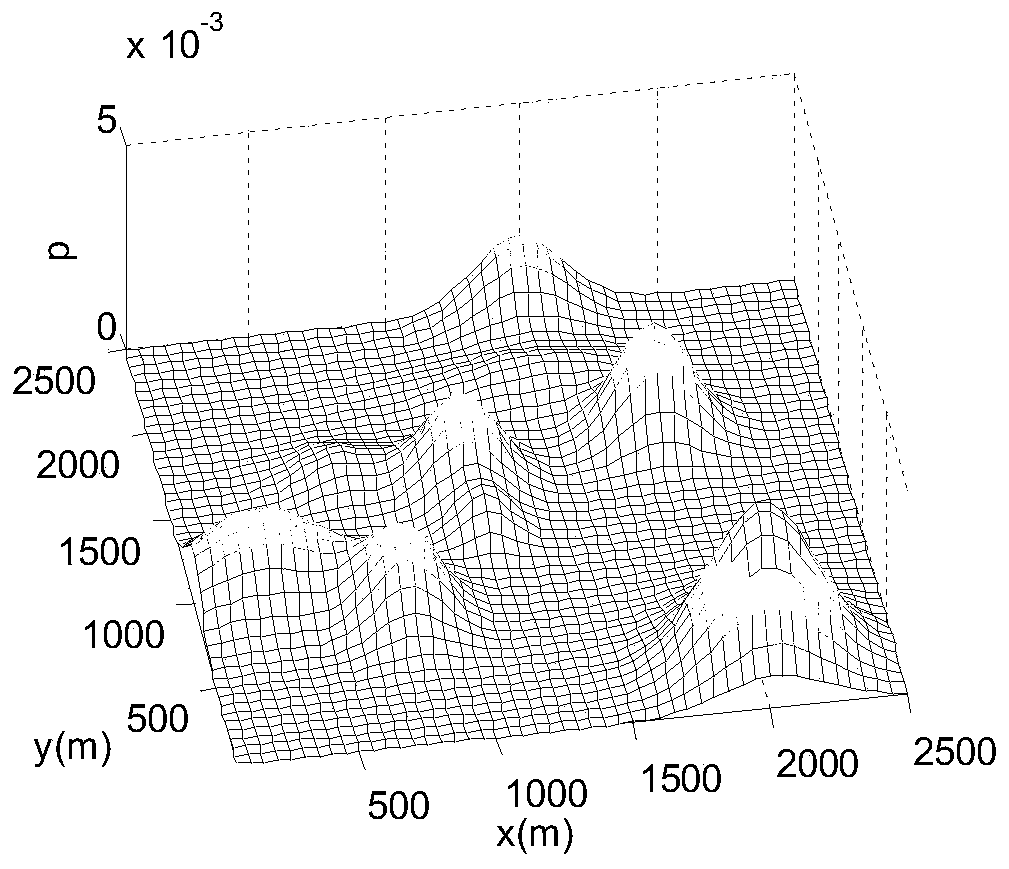
[0058] The core of the underwater robot cooperative target search problem is how to plan the path of multiple robots, focusing on the efficient coverage search of the target area by the robot. In addition, basic tasks such as autonomous obstacle avoidance, collision avoidance, and communication maintenance need to be considered, so the problem is difficult to solve. bigger. Based on the existing heuristic method, the present invention proposes a collaborative target search method for underwater robots based on the global transfer mechanism of search map information, so that the search map information at each position in the task area is transferred to each other and weighted to update, and at the same time directly and quickly introduces High value rewards in some areas to guide underwater robots to search for targets more efficiently. T...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More