Mechanical arm trajectory tracking control method and device based on instruction filter
A trajectory tracking and control method technology, which is applied to manipulators, program-controlled manipulators, manufacturing tools, etc., can solve the problems of small application range and complicated controller design process, and achieve the effect of less difficulty and simplified calculation process
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
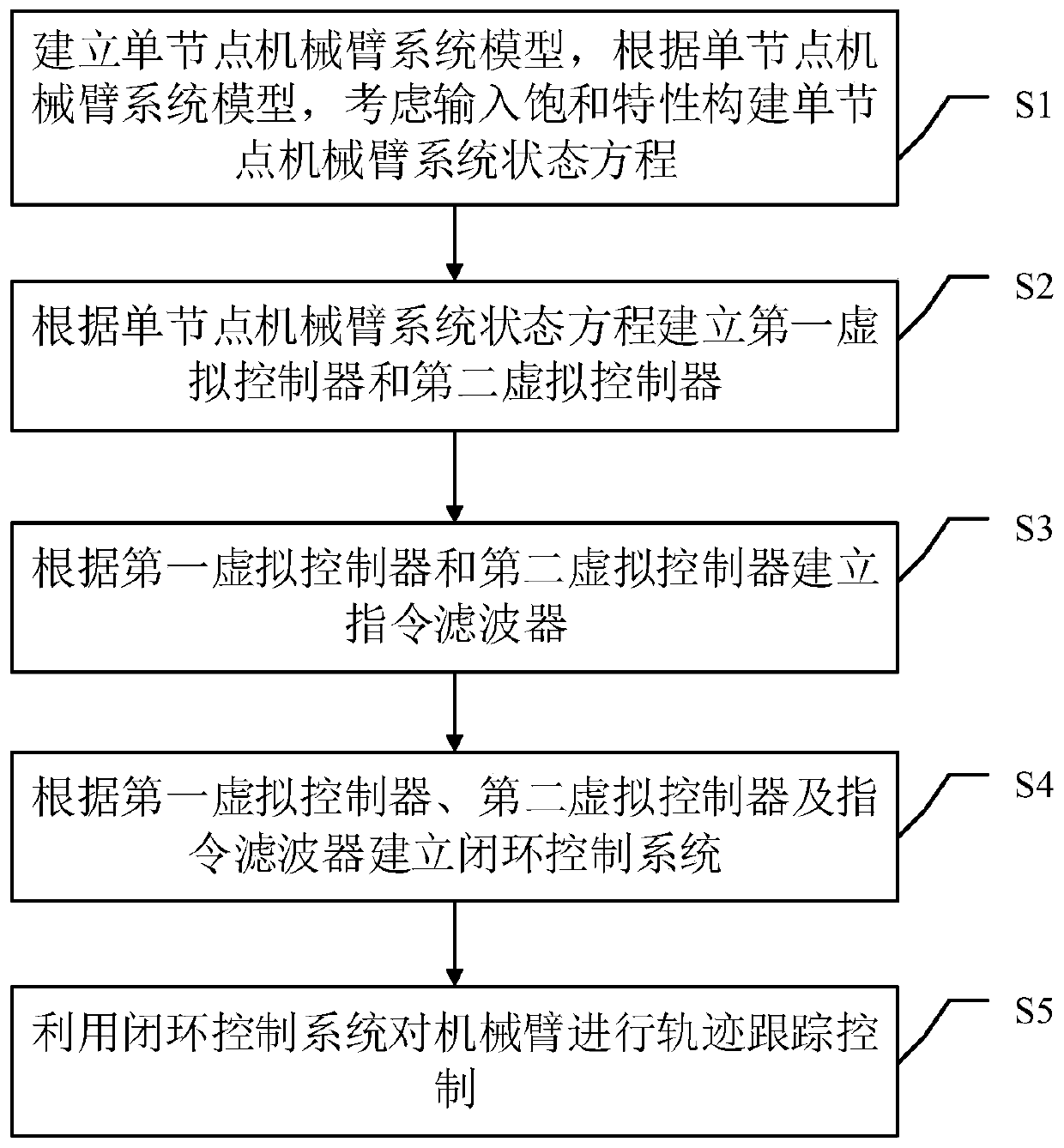
[0067] Such as figure 1 Shown, the manipulator trajectory tracking control method based on instruction filter, described method comprises:
[0068] Step S1: Establish the single-node manipulator system model, and construct the state equation of the single-node manipulator system considering the input saturation characteristics according to the single-node manipulator system model; the specific process is as follows:
[0069] use the formula
[0070]
[0071] Establish a single-node manipulator system model, where q represents the angle of the single-node manipulator joint, Represents the angular velocity of a single-node manipulator joint, Represents the angular acceleration of the single-node manipulator joint; τ is the control torque generated by the motor subsystem, τ d is the external disturbance torque and ω is the random disturbance moment, is the first derivative of the random disturbance moment, u is the control input torque of the electromechanical system,...
Embodiment 2
[0135] Corresponding to Embodiment 1 of the present invention, Embodiment 2 of the present invention also provides a robot arm trajectory tracking control device based on a command filter, said device comprising:
[0136] The state equation acquisition module is used to establish a single-node manipulator system model, and according to the single-node manipulator system model, considers input saturation characteristics to construct a single-node manipulator system state equation;
[0137] A virtual controller building module is used to set up a first virtual controller and a second virtual controller according to the single-node manipulator system state equation;
[0138] An instruction filter establishment module is used to establish an instruction filter according to the first virtual controller and the second virtual controller;
[0139] A closed-loop control system establishment module is used to establish a closed-loop control system according to the first virtual control...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com