

Method for fast and accurately realizing concrete pump truck cantilever crane movement locus
A concrete pump truck and boom technology, which is applied to instruments, adaptive control, control/adjustment systems, etc., can solve the problems of complicated planning process of the movement trajectory of the boom end, cumbersome calculation, large amount of calculation, etc. Control, simple calculation process, fast algorithm effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
[0035] The invention discloses a method for quickly and accurately realizing the movement trajectory of the arm frame of a five-section arm concrete pump truck. The specific steps are as follows:
[0036] step 1:
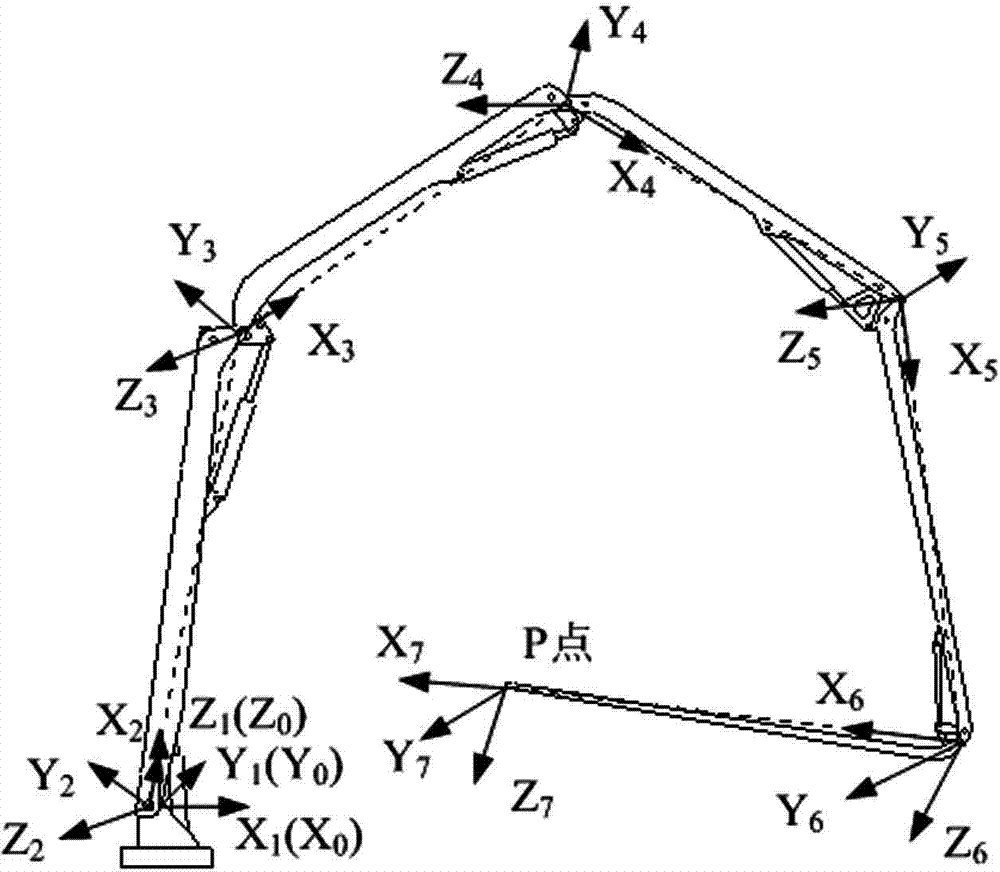
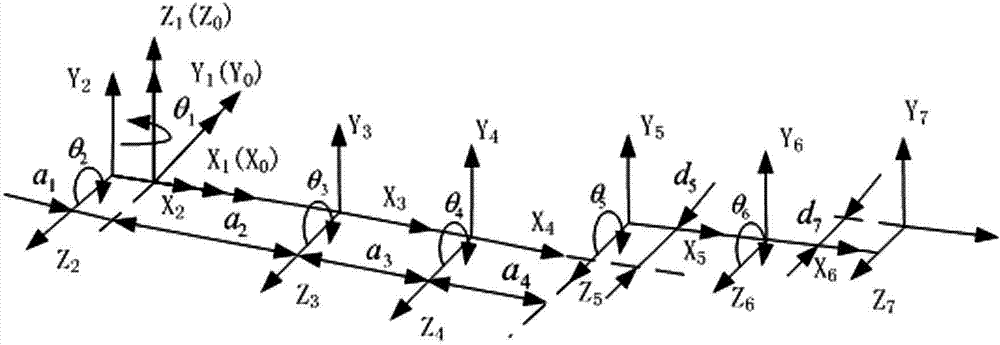
[0037] Establish the boom system coordinate system model. According to the structural model of the arm frame system of the five-section arm concrete pump truck, the joint coordinate system of the arm frame mechanism of the concrete pump truck is established, as shown in figure 1 As shown, a total of seven joint coordinate systems are established, and the pouring end of the boom is marked with point P, and its coordinates are (x 7 ,y 7 ,z 7 ). Measure the structural size of the boom to obtain the connecting rod parameters of the D-H matrix, as shown in Table 1.
[0038] Step 2:
[0039] Solve for the coordinates of P at the pouring end of the jib. Analysis of the jib coordinate system and connecting rod parameters shows that the coordinates of point P at the ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More