Mobile robot path planning method integrating membrane calculation and RRT
A mobile robot and path planning technology, applied in navigation computing tools, instruments, non-electric variable control, etc., can solve the problems of poor planning path rationality, purposeless search, single expansion node, etc., to avoid unreasonable path planning and Poor real-time performance, reasonable path, and increased search range
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0029] The present invention will be further explained below in conjunction with the accompanying drawings.
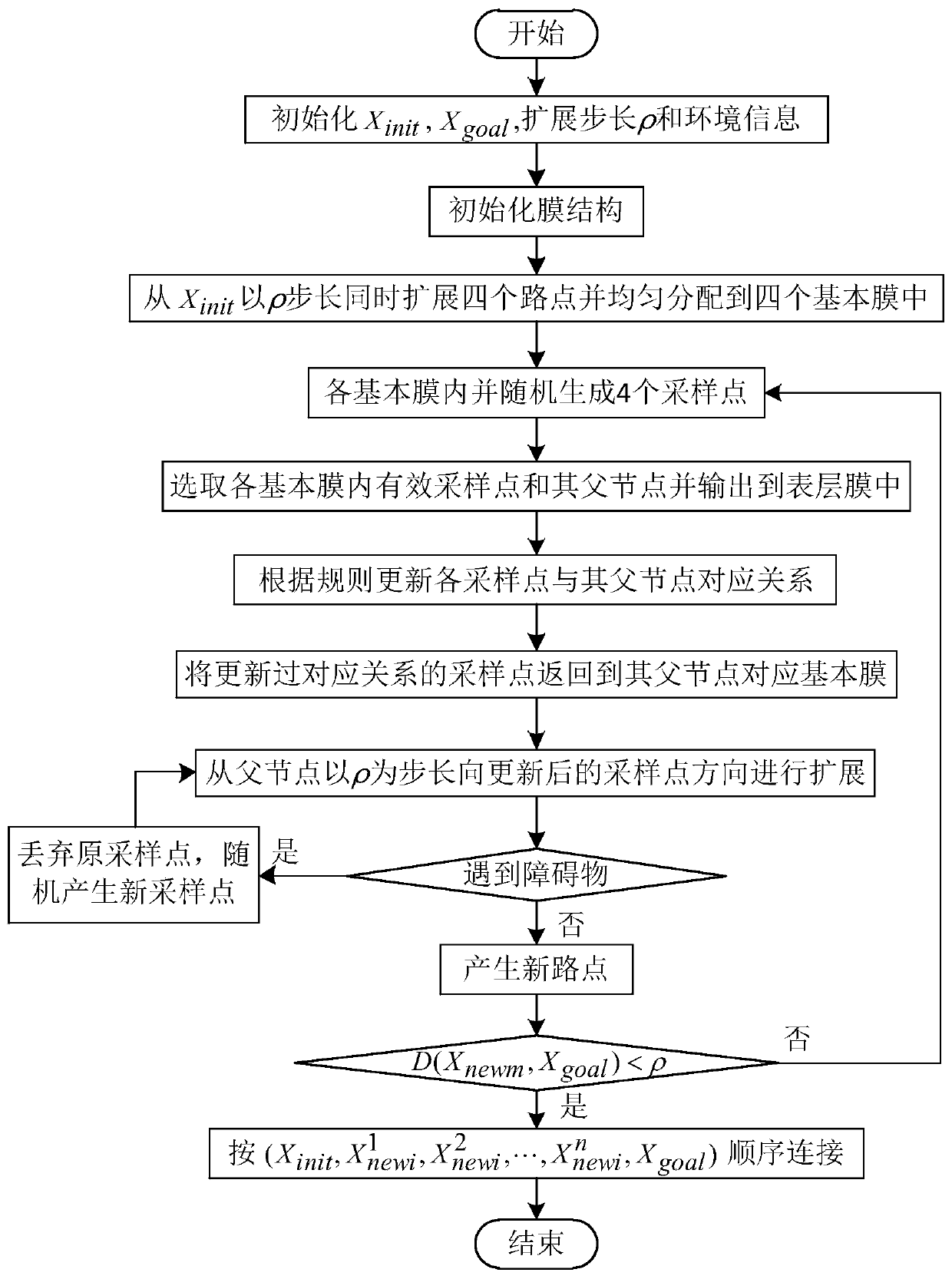
[0030] like figure 1 As shown, a mobile robot path planning method that fuses membrane computing and RRT includes the following steps:
[0031] Step 1: Initialize the starting waypoint X init , target waypoint X goal , the robot expands the step size ρ and the environment information;
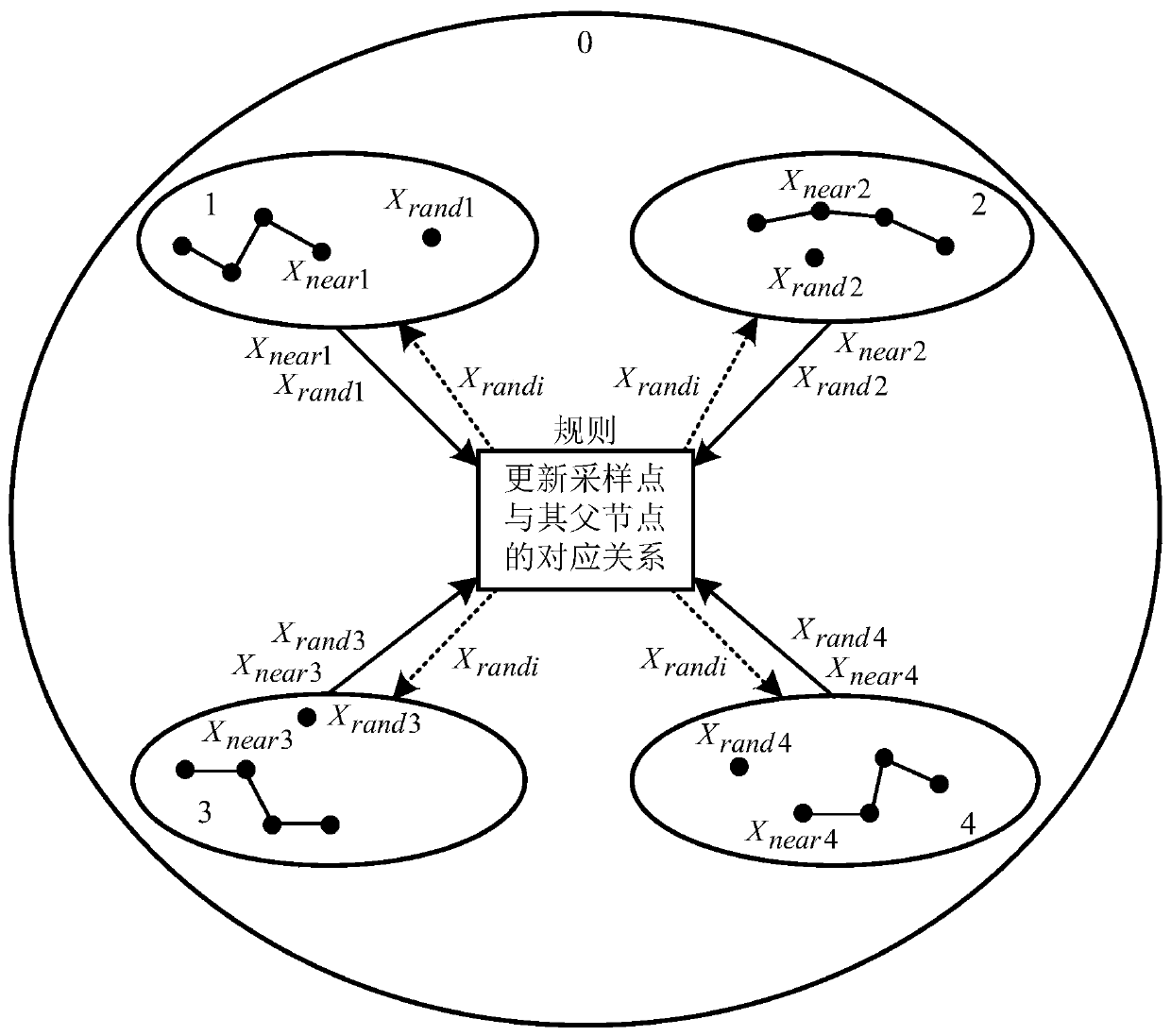
[0032] Step 2: Initialize the membrane structure in membrane calculation as [[] 1 ,[] 2 ,[] 3 ,[] 4 ] 0 ;
[0033] Step 3: Take the starting point X init As the parent node, randomly generate four sampling points, and start from X init Take ρ as the expansion step to expand to each sampling point to form four new effective waypoints X new ;
[0034] Step 4: Combine the four valid waypoints ( Indicates the first effective waypoint in the i-th basic membrane) is evenly distributed to four basic membranes, and the be regarded as the first waypoint in the corresponding ele...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More