Reinforcement learning awarding method suitable for movable mechanical arm
A mobile robot arm and reinforcement learning technology, applied in the direction of manipulators, program-controlled manipulators, manufacturing tools, etc., can solve a large number of human experience, the manipulator can not adapt to changes in the external environment in time, complex kinematics and other problems
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0079] The present invention will be further explained below in conjunction with the accompanying drawings and specific embodiments.
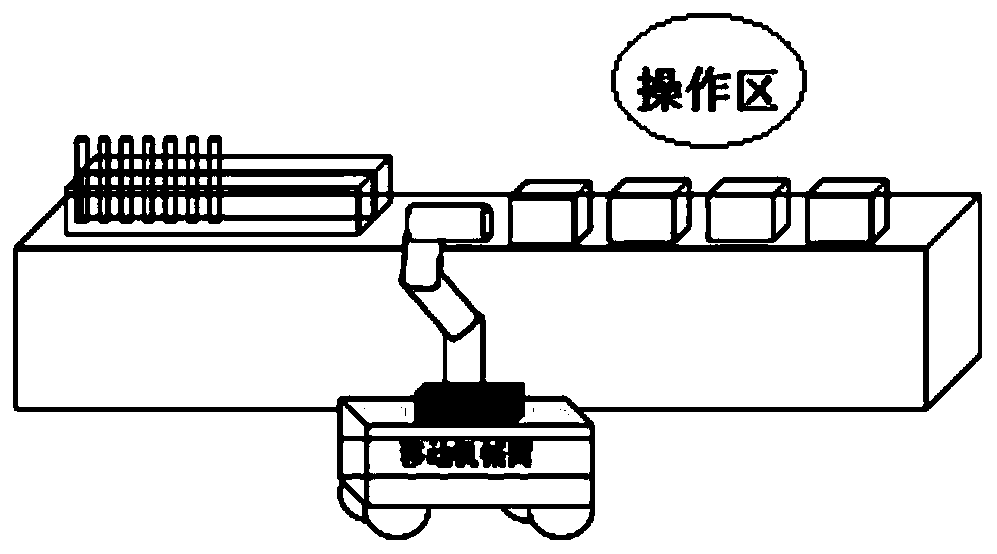
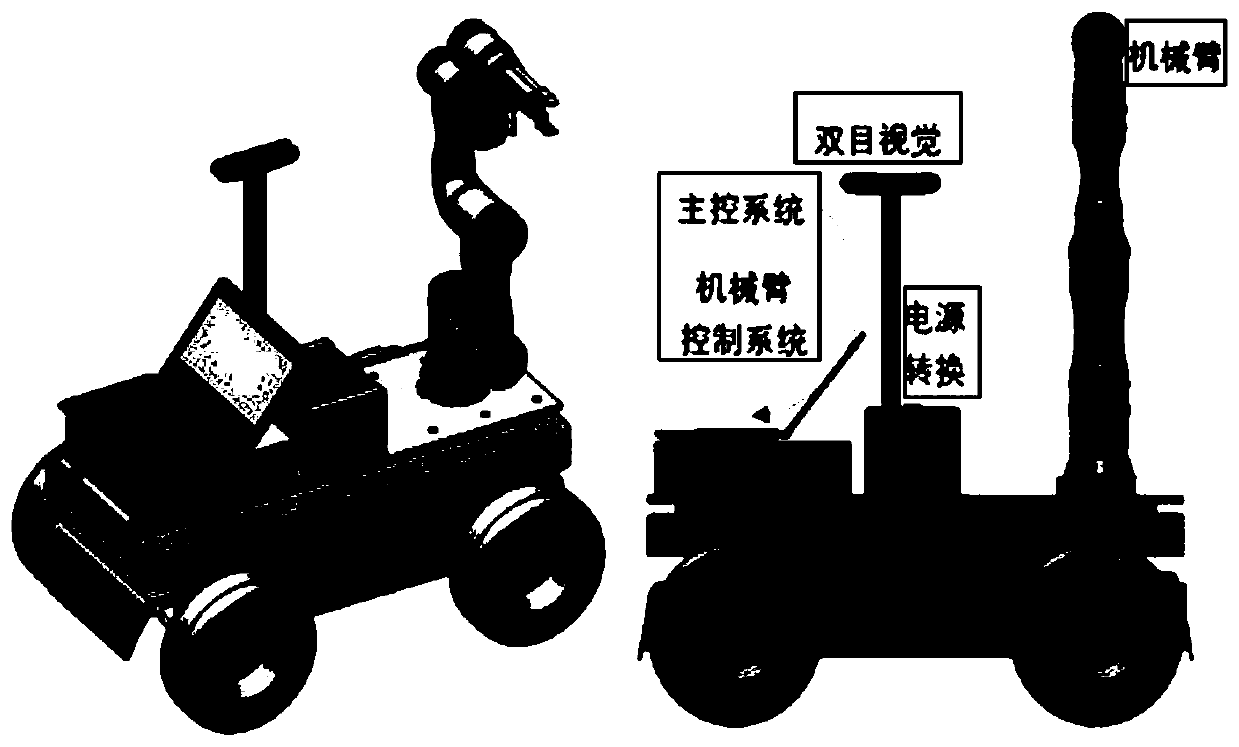
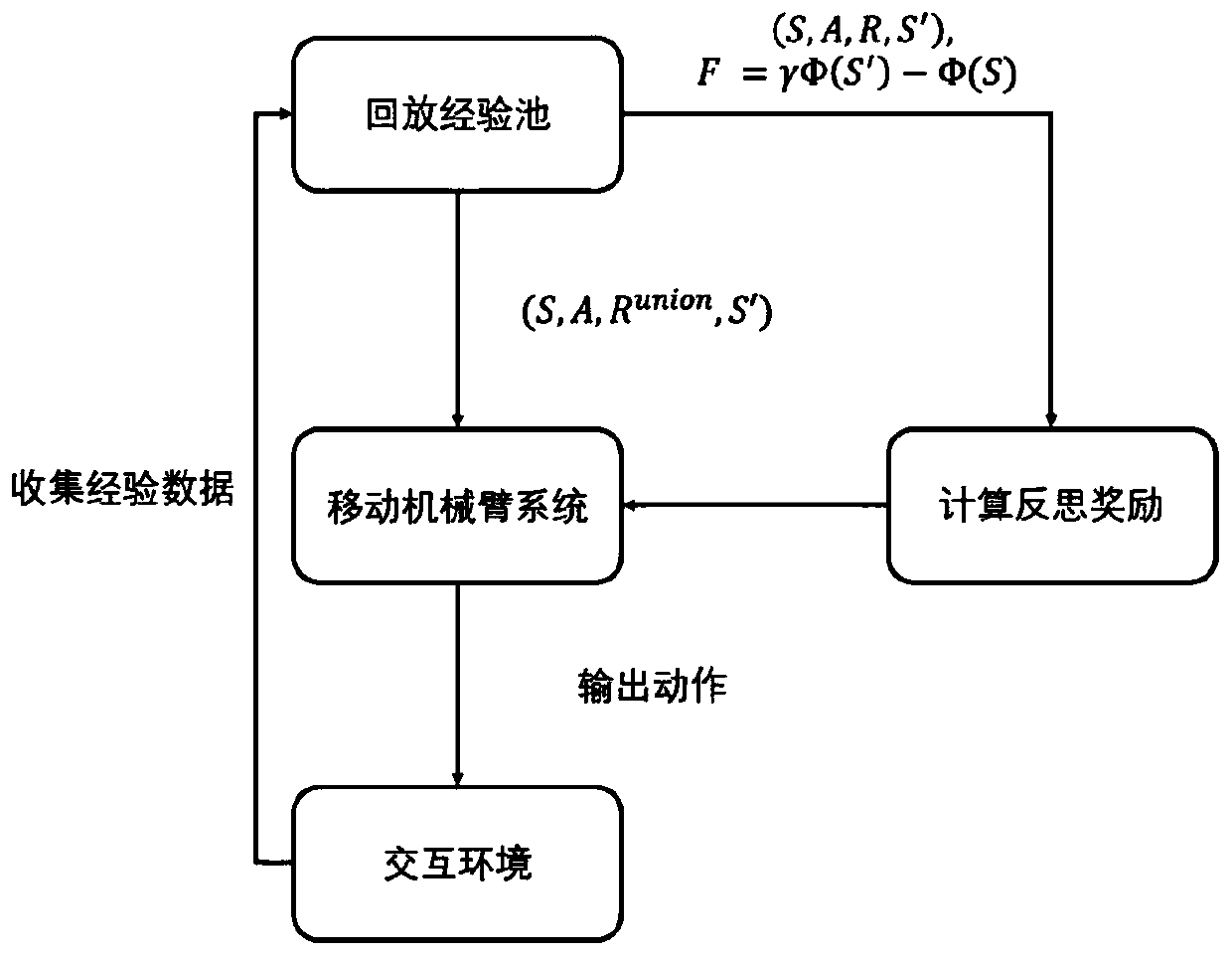
[0080] as attached figure 1 Shown: This embodiment provides a reinforcement learning reward method suitable for mobile manipulators. The present invention utilizes an additionally designed reflective reward function so that the mobile manipulator can learn the target strategy faster and complete the task under the training of the reinforcement learning algorithm. corresponding control tasks. The present invention is described in detail by taking a mobile mechanical arm system with 6 degrees of freedom as an example. The end of the mechanical arm is a two-finger gripper that can grip a dropper, and the gripper can move horizontally and vertically; and Attached to the robotic arm is a four-wheeled mobile robot that moves only horizontally in the mission setting. The task scenario designed in this embodiment is to use the mobile robot arm to com...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com