

Strong-robustness full-envelope integrated control method for tilt-rotor unmanned aerial vehicle
A strong and robust tiltrotor technology, applied in vehicle position/route/altitude control, non-electric variable control, control/regulation system, etc., can solve problems such as discontinuity, aircraft state fluctuations, and threats to flight safety
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
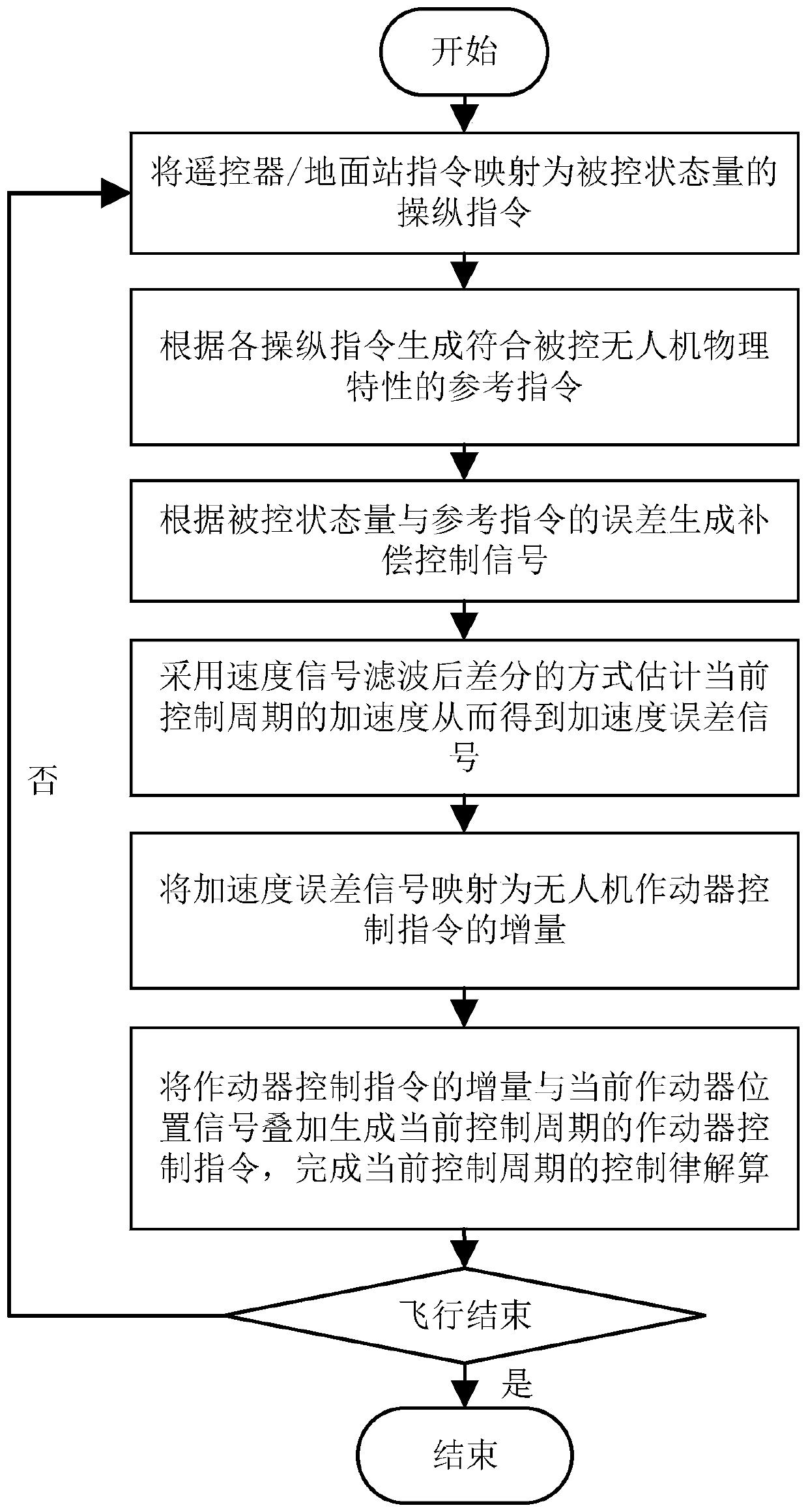
[0101] The first step is to map the commands of the remote controller or ground station into manipulation commands of the controlled state quantity.
[0102] The mapped manipulation instructions are:
[0103] the y p =[th f h c φ c θ c r c ] T (2)
[0104] Among them, th f Indicates the throttle command for forward flight. The physical meaning is the projection of the total throttle command of the tiltrotor on the x-axis direction of the body axis. When the controlled UAV is in multi-rotor mode, th f zero; H c Indicates height command; φ c Indicates the roll angle command; θ c Indicates pitch angle command; r c Indicates the yaw rate command.
[0105] The second step is to produce reference instructions that conform to the physical characteristics of the controlled UAV according to each manipulation instruction.
[0106] The reference models of the altitude command, the pitch angle command and the roll angle command are all second-order reference models, and...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More