

Unmanned driving anti-swing positioning method and system based on self-adaptive neural fuzzy control
A neuro-fuzzy, positioning method technology, applied in the direction of adaptive control, general control system, control/regulation system, etc., can solve the problems of difficult industrial field application, complex relationship, etc., achieve simple algorithm, simplify neural network, and solve the problem of oscillation. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0025] The technical solutions of the present invention will be further described below in conjunction with the accompanying drawings and specific embodiments.
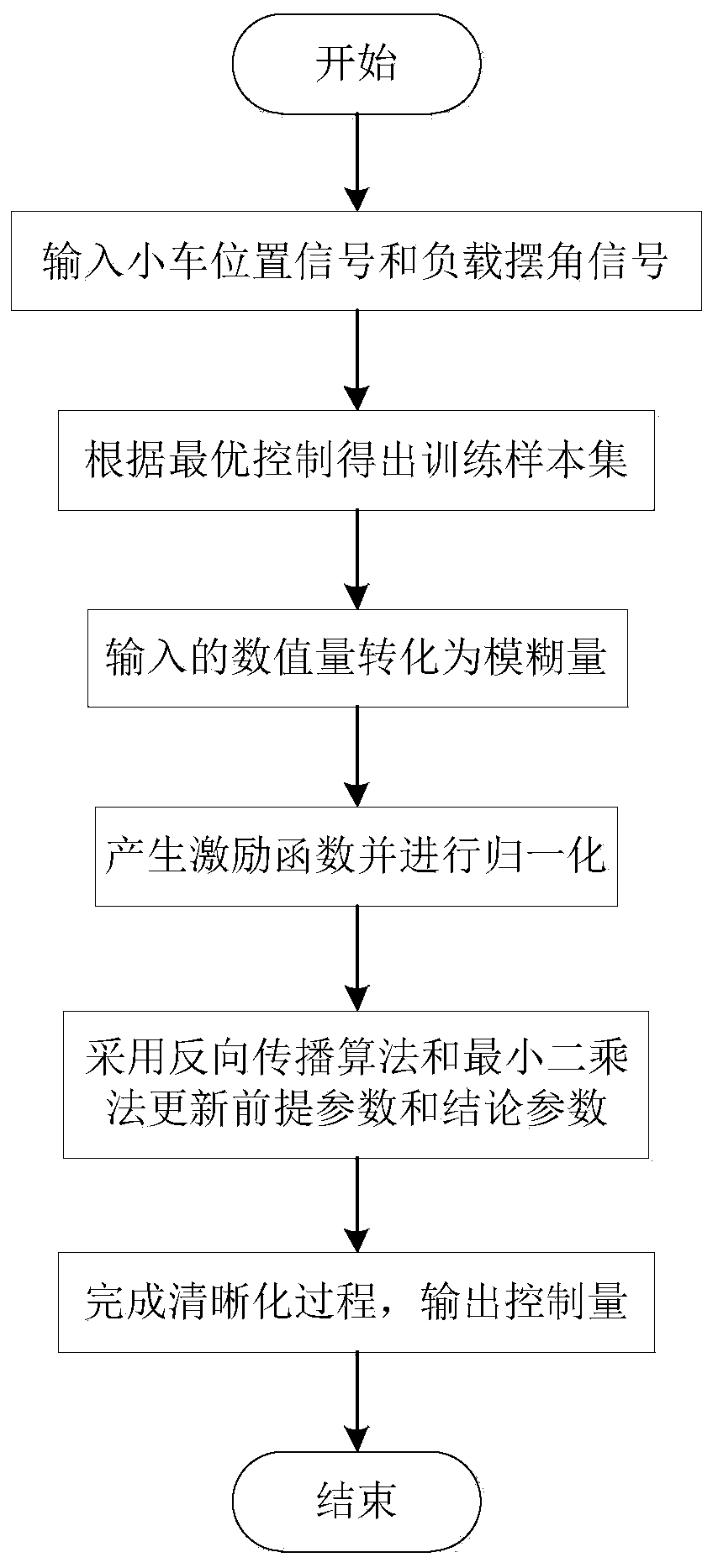
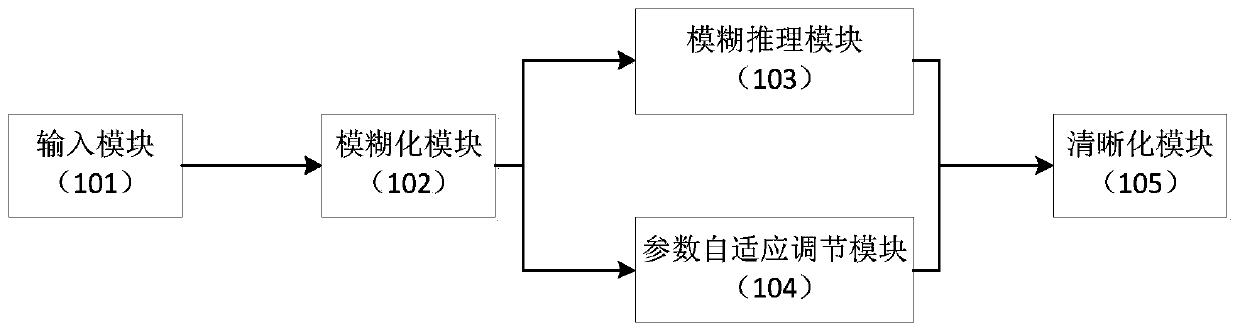
[0026] refer to figure 1 , the self-adaptive neuro-fuzzy control based anti-sway positioning method for unmanned vehicles proposed in this embodiment is based on a multi-layer forward neural network and a first-order Sugeno fuzzy model, a fuzzy reasoning system is established through adaptive modeling, and the neural network is used to The technology realizes fast anti-shake and precise positioning of unmanned vehicles by learning a large amount of known data. In order to cooperate with signal acquisition and realize the control of the trolley, in the embodiment, SATEC STAD-2000 angle measuring instrument is used to measure the angle of loading, SICK DL-100 laser rangefinder is used to measure the position of the trolley, and SCIYON NT6000V3A controller is used to run the control program , SCIYON KD-200 inverter is u...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More