

Turnover box automatic positioning method based on image geometrical characteristics
A geometric feature and automatic positioning technology, applied in the field of image analysis, can solve problems such as low efficiency, uncontrollable error rate, small turnover box spacing, etc., and achieve the effect of short time, accurate positioning effect, and less hardware changes
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment 1
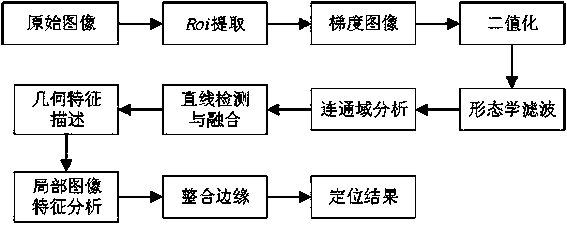
[0054] like figure 1 , figure 2 and image 3 As shown, the present invention provides a method for automatic positioning of turnover boxes based on image geometric features, including the following steps:
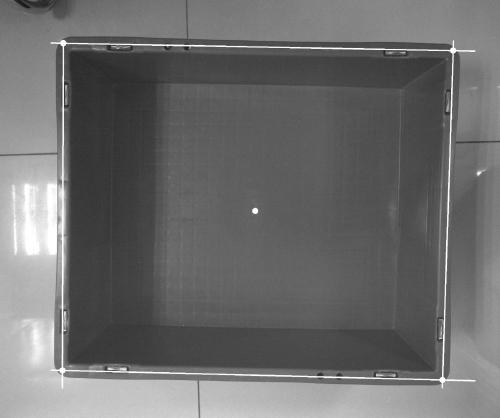
[0055] S1: According to the original image obtained from the camera, the vertical edge and horizontal edge are obtained, and the area where the vertical edge and horizontal edge are located is intercepted as the region of interest ( Roi image), specifically, the four sides corresponding to the upper, lower, left and right sides of the turnover box Roi The images are recorded as Roi_u , Roi_d , Roi_l , Roi_r .
[0056] S2: convert each Roi The image sequentially extracts the RGB channel components, and then Roi The image is grayscaled to obtain a grayscale image, and a total of 4 single-channel images are obtained. The gradient image is obtained for each single-channel image, and then the local threshold method is used to binarize each gradient image. The loca...
Embodiment 2
[0088] like Figure 4 to Figure 10 As shown, in the actual production process, the collected turnover box images may have incomplete targets, that is, if only 3 sides are photographed, then 3 images will be generated Roi image, for the 3 generated Roi The steps of image processing are similar to the case of photographing 4 sides, the difference is that in the process of calculating the center point and rotation angle, the length and width of the box are known, and the captured complete edges and Compare the known length and width dimensions of the box to determine whether the complete edge is long or wide, and then divide each Roi The detection result of the image is mapped to the original image, and the average value of the angles of the three detected sides is used as the rotation angle of the box, and the final center point is calculated according to the size and rotation angle of the box. This method is suitable for batch image processing of the turnover box size of the ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More