

Training and mode switching method of pure idea control rehabilitation robot
A rehabilitation robot and mind control technology, applied in muscle training equipment, character and pattern recognition, equipment, etc., can solve the problems of high cost of rehabilitation training methods, poor training effect, and reduced user comfort and convenience, etc., to achieve Improve the convenience and comfort, improve the effect, repair the effect of the motor neural network
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0017] A method for training and mode switching of a purely mind-controlled rehabilitation robot of the present invention will be described in detail below in conjunction with embodiments and drawings.
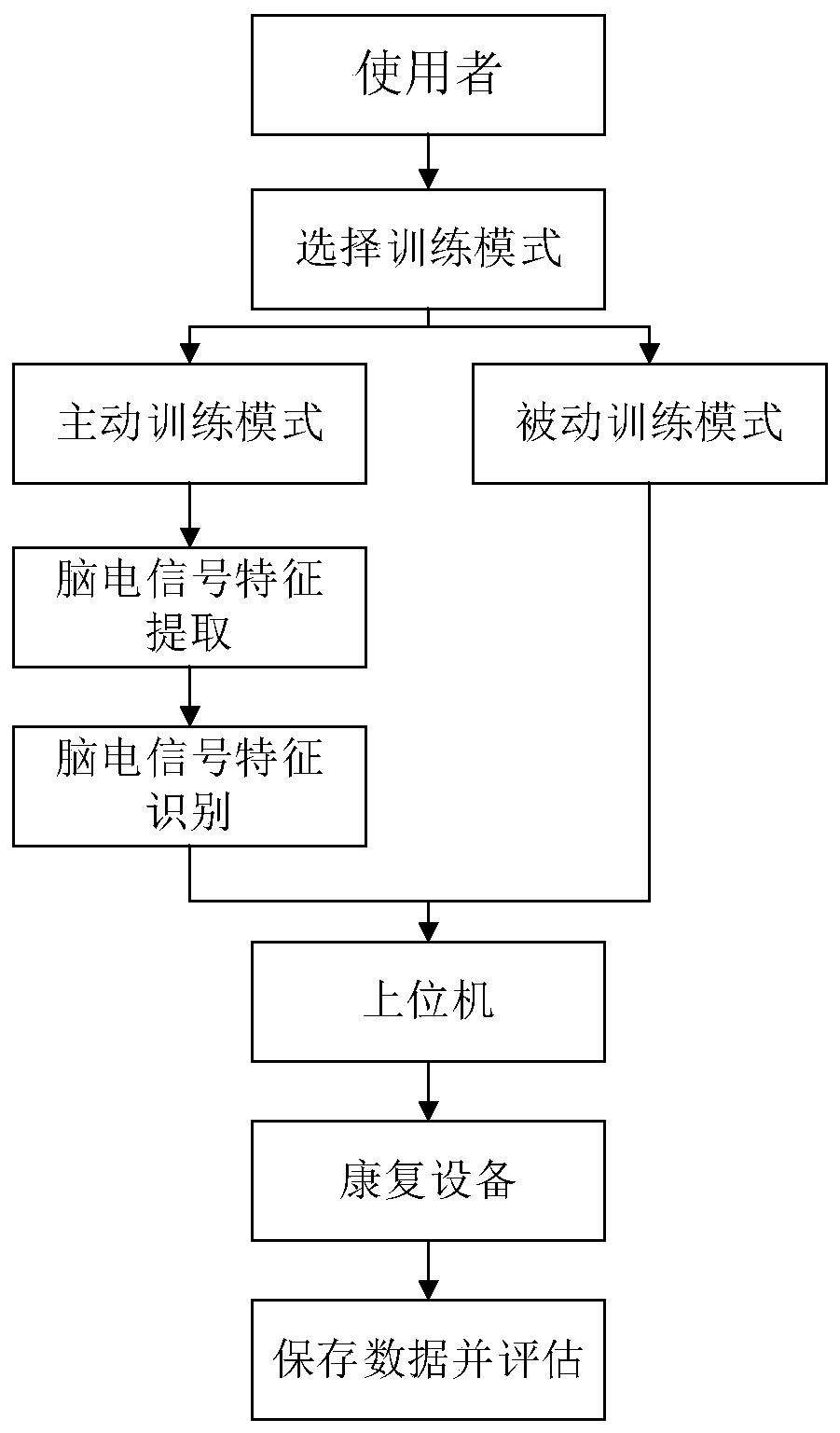
[0018] Such as image 3 As shown, a method for training and mode switching of a purely mind-controlled rehabilitation robot of the present invention comprises the following steps:
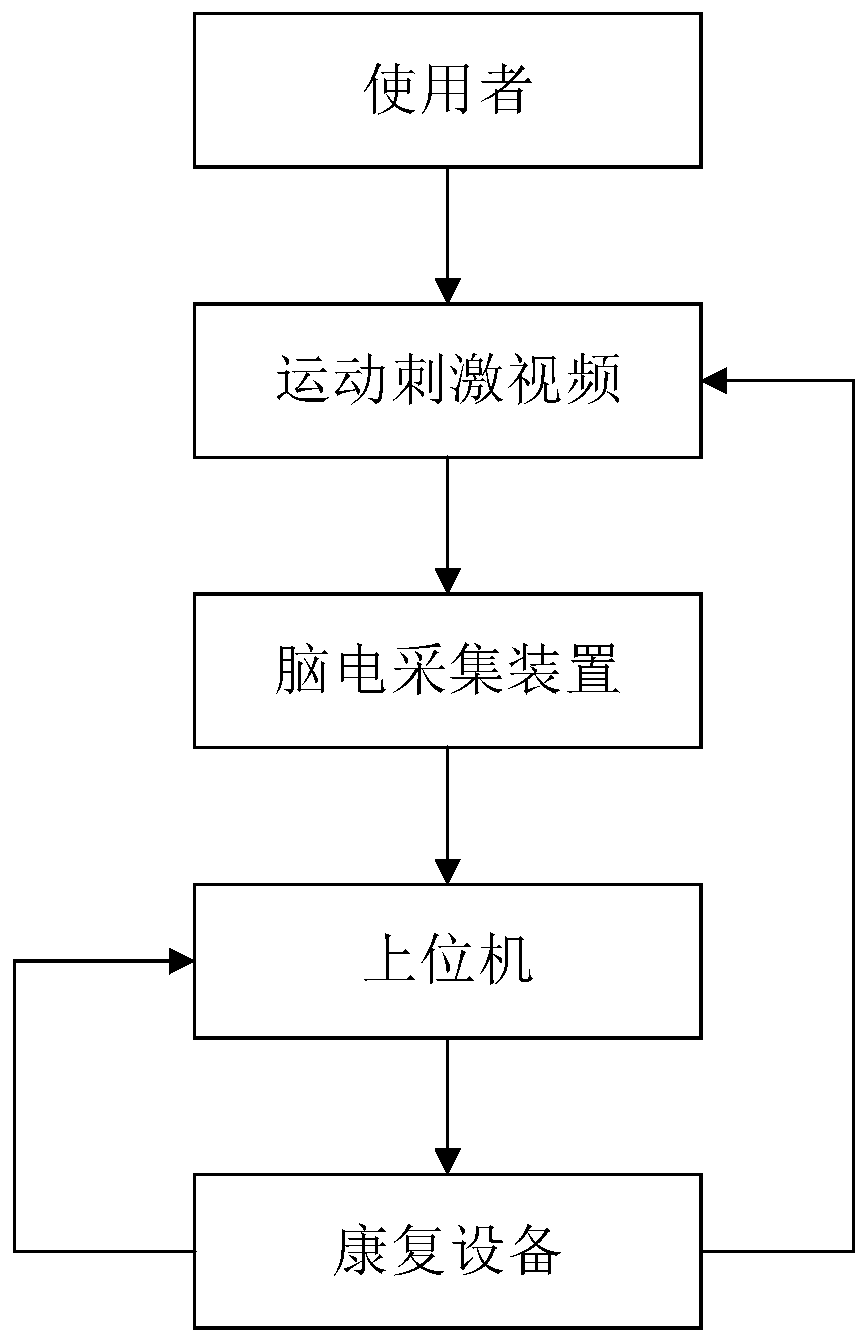
[0019] 1) The user selects the training mode of the rehabilitation equipment. If the active training mode is selected, enter step 2). If the passive training mode is selected, the host computer directly sends corresponding control commands to control the rehabilitation equipment to assist limb movement;
[0020] In the active training mode, the user controls the rehabilitation equipment through motor imagination to help the limbs perform rehabilitation training and complete rehabilitation training tasks; in the passive training mode, the user directly drives the limbs to perform rehabilitation trai...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More