Active stroke lower limb rehabilitation robot control method based on healthy side and affected side coupling
A rehabilitation robot and control method technology, applied in passive exercise equipment, sensors, medical science and other directions, can solve the problem of difficulty in designing a lower limb rehabilitation robot, and achieve reliable motion intention, accurate control, and accurate and reliable parameter adjustment.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0045] The present invention will be further described in detail below through the specific examples, the following examples are only descriptive, not restrictive, and cannot limit the protection scope of the present invention with this.
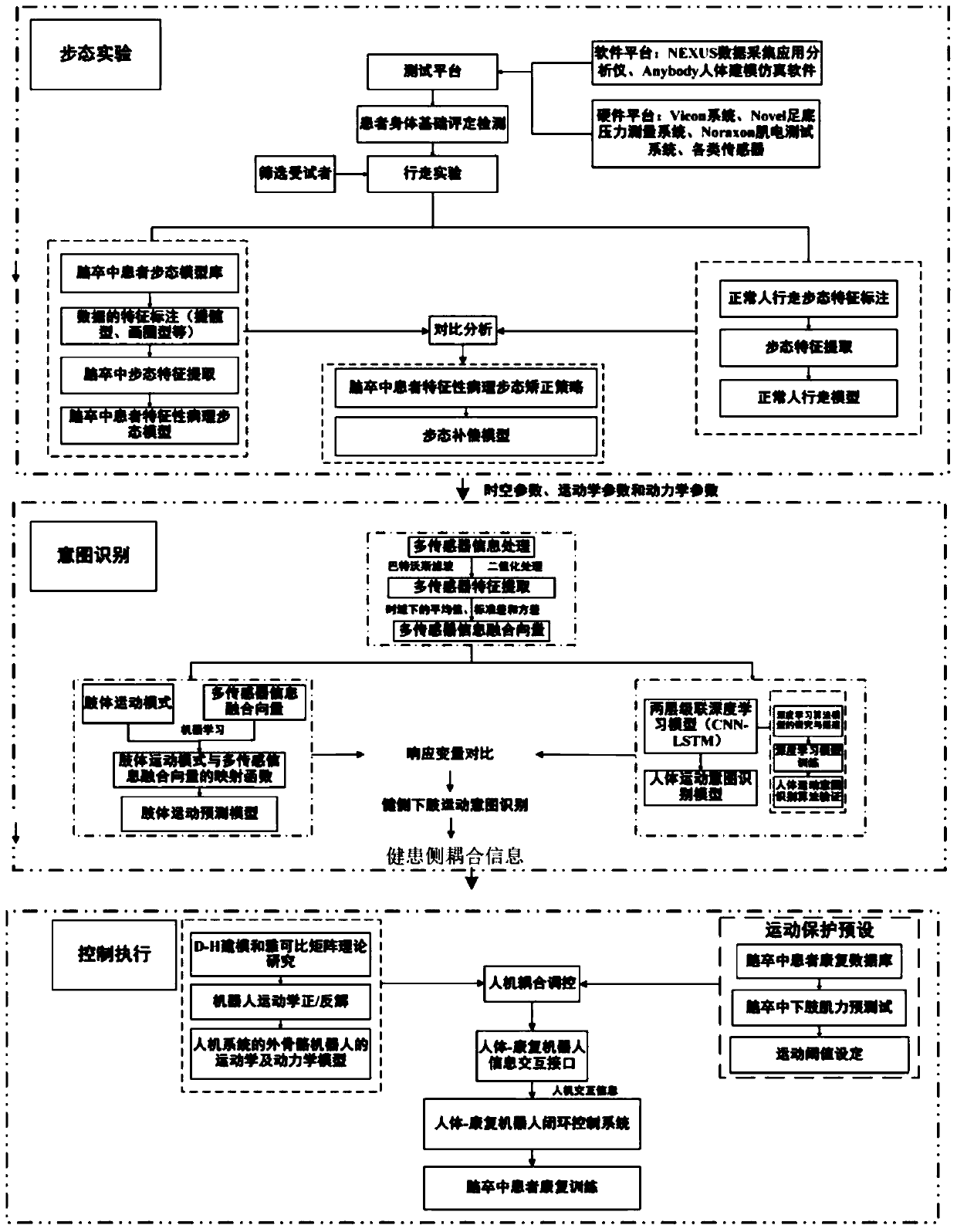
[0046] An active stroke lower limb rehabilitation robot control method based on the coupling between the healthy and the affected side, such as figure 1 As shown, the control method includes the following steps:
[0047] 1) Construct characteristic parameters of pathological gait in patients with lower extremity motor loss after stroke through gait experiments, and formulate a characteristic pathological gait correction strategy based on the characteristic pathological gait model to guide the formulation of control strategies. The specific steps are as follows:
[0048]A. Carry out physical assessment and examination for patients with lower limb motor loss after stroke, understand the patient's course of disease, and at the same time obtain ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More