

Lane line detection method based on vanishing point estimation and semantic segmentation
A technology of lane line detection and semantic segmentation, applied in the field of image processing, can solve the problems of long time-consuming lane line detection and low detection accuracy, and achieve the effects of reducing parameters and calculations, suppressing noise, and good adaptability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
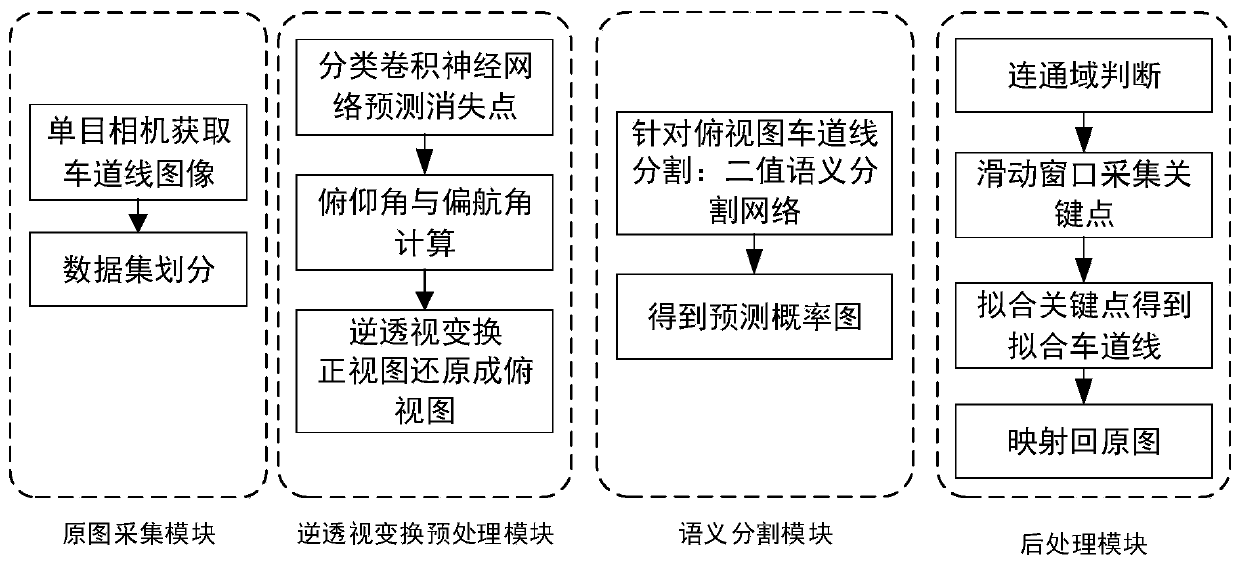
[0052] An embodiment of the present invention provides a lane line detection method based on vanishing point estimation and semantic segmentation. The overall flow chart is as follows figure 1 As shown, the specific steps are as follows:
[0053] Step 1. Collect images containing lane lines in different scenes, and mark the lane lines and road vanishing points of the images to form a data set. Divide the data set into a training set, a verification set, and a test set according to a certain proportion. Among them, training The set is used to train the deep convolutional network, the verification set is used to select the best training model, and the test set is used to test the performance of the designed model later.
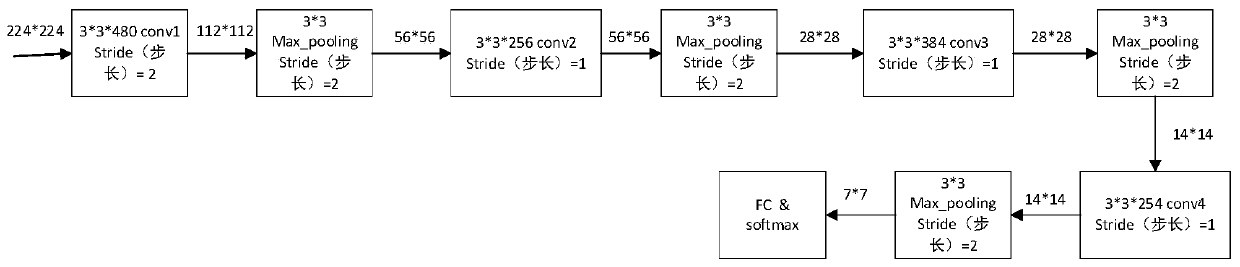
[0054] Step 2. Design a classification convolutional neural network to estimate the coordinate position of the vanishing point, and send the marked image into the classification convolutional neural network to obtain the best training model, and obtain the coor...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More