

Flexible needle plane puncture controlling device based on brain emotion learning intelligent control algorithm and method thereof
An intelligent controller and flexible needle technology, applied in the directions of puncture needle, adaptive control, general control system, etc., can solve the problem of difficulty in ensuring that the patient's position does not change, not considering the influence of uncertain puncture paths, and large differences in characteristics between tissues, etc. problem, to achieve the effect of online real-time control and precise control, low self-adaptation, and low calculation amount
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0037] The present invention will be further described in detail below in conjunction with the accompanying drawings.
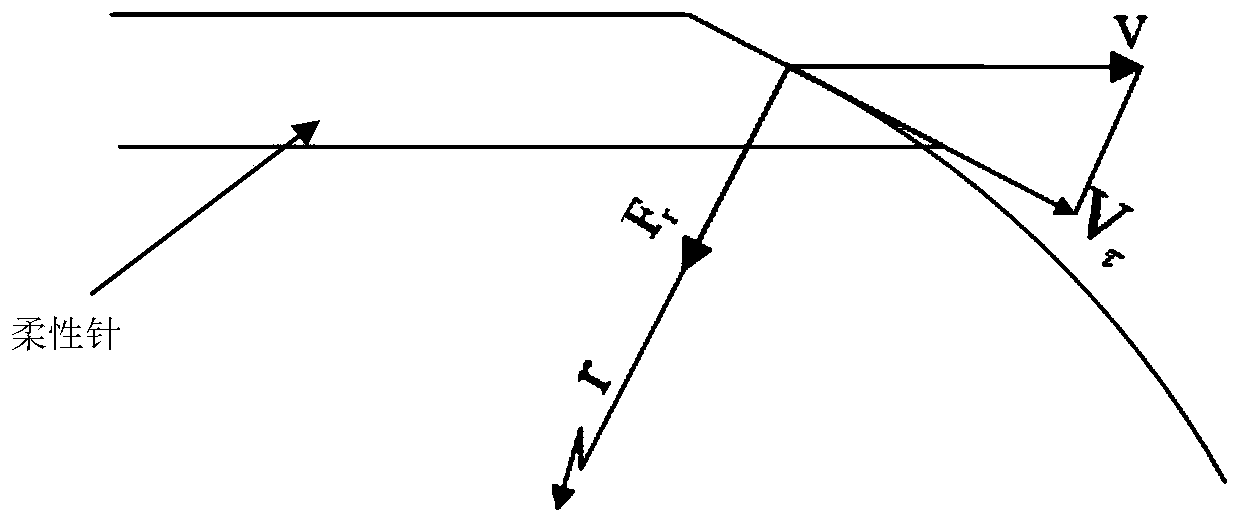
[0038] The flexible needle control problem studied in the present invention mainly involves a flexible needle control platform, which includes two DC motors, sensors, and a computer. Two DC motors, one is a feed motor, which is used to realize the feed movement of the flexible needle, and the other is a rotation motor, which is used to realize the rotation movement of the flexible needle tip. Both DC motors and sensors are mounted on the flexible needle, that is, on the flexible needle puncture robot. The computer calculates the control signal of the DC motor according to the signal transmitted by the sensor, so as to track and adjust the movement of the flexible needle.
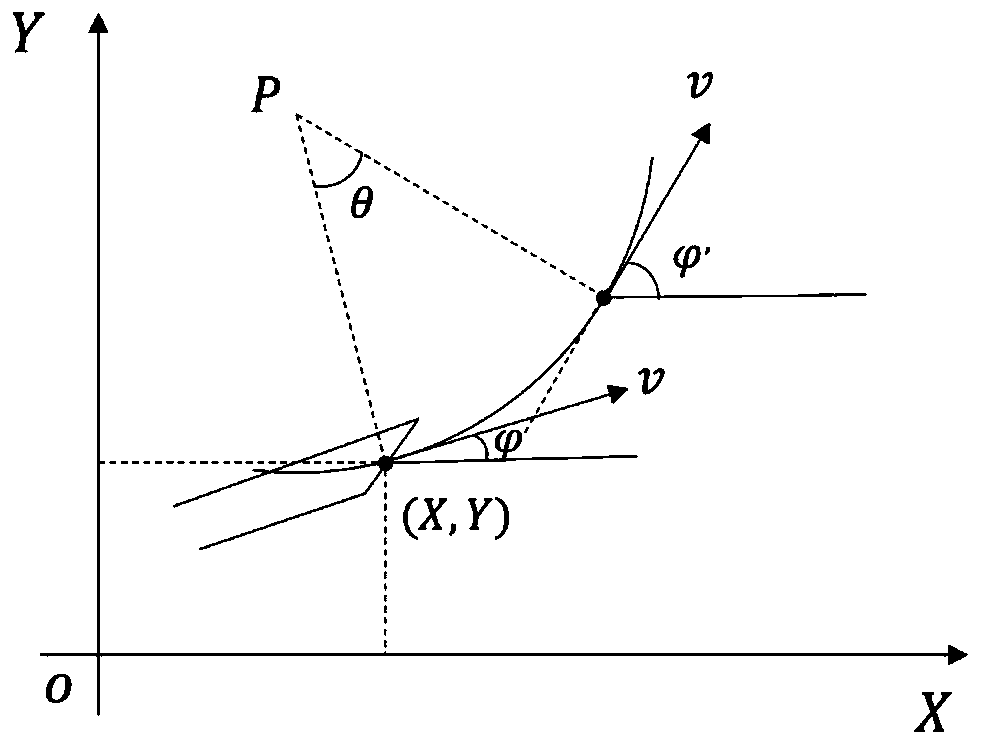
[0039] First, the present invention establishes a kinematics model of the flexible needle according to the dynamics and kinematics characteristics of the flexible needle.
[0040] Assume ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More