

Laser SLAM method based on surface line corner feature extraction
A technology of corner feature and line feature, which is applied in the field of laser SLAM based on surface line corner feature extraction, can solve the problem of huge data volume, achieve good map building effect and increase error effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0057] The present invention will be described in further detail below in conjunction with the accompanying drawings and specific embodiments. It should be understood that the specific embodiments described here are only used to explain the present invention, not to limit the present invention.
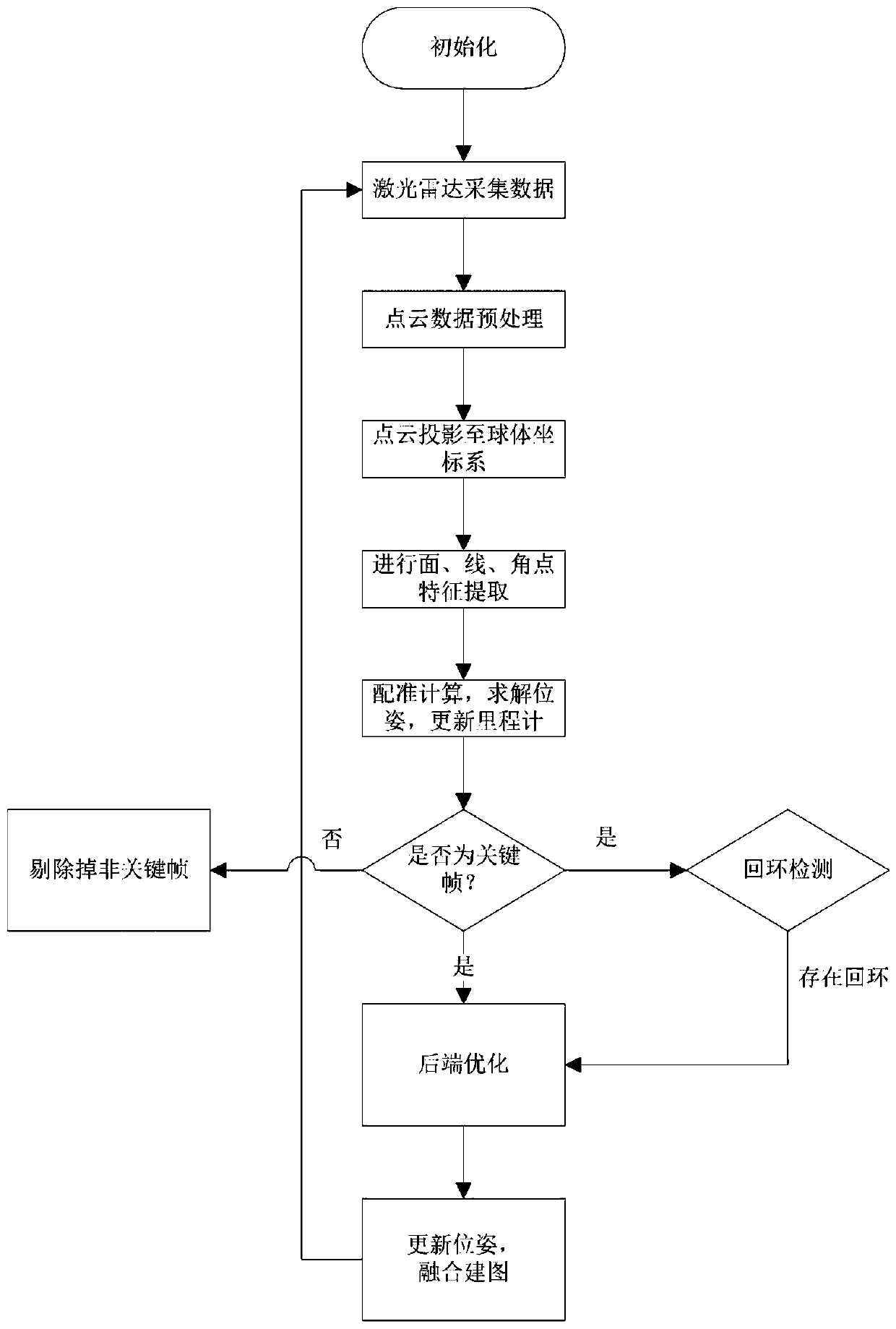
[0058] According to the laser SLAM method based on surface line corner feature extraction described in the present invention, the specific framework of the method is as follows figure 1 shown.
[0059] The key steps are as follows:
[0060] 1. Initialize the map and various parameters, and allocate memory;
[0061] 2. Collect the point cloud collected by 3D lidar;
[0062] 3. Perform data preprocessing on the collected point cloud, and remove the point cloud points beyond the effective range of the lidar; the preprocessing of the point cloud is as follows:
[0063] (301) Traversing all the original point clouds, setting the effective distance, using a filter, removing the point cl...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More