

Mobile robot path planning method based on improved RRT algorithm
A mobile robot, path planning technology, applied in instruments, motor vehicles, non-electric variable control, etc., can solve the problems of low planning success rate, non-optimal path, poor real-time performance of RRT* algorithm, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0062] The invention will be further described below in conjunction with the accompanying drawings and specific implementation examples.
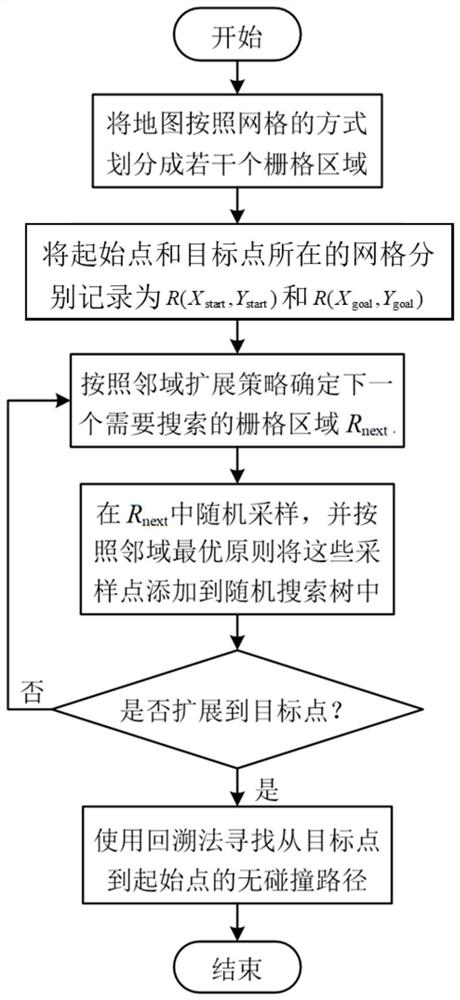
[0063] like figure 1 As shown, a mobile robot path planning method based on the improved RRT algorithm includes the following steps:
[0064] Step 1: Collect the working environment information of the robot through the visual camera, lidar sensor, ultrasonic sensor, and infrared sensor equipped with the mobile robot, and then use information fusion and SLAM (Simultaneous Localization And Mapping for short SLAM) technology to establish a map of the working environment of the mobile robot. Among them, the visual camera collects the image information of the obstacle, the laser radar sensor and the ultrasonic sensor collect the position information of the surrounding objects, and the infrared sensor collects the distance information between the mobile robot and the obstacle. Figure 4 ~ Figure 6 In , the black part is the obstacle area, and th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More