

Rapid tracking control method for horizontal plane trajectory of benthic AUV
A tracking control and trajectory tracking technology, applied in control/adjustment systems, height or depth control, non-electric variable control, etc., can solve problems such as slow adjustment speed and limited control accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
[0025] DETAILED DESCRIPTION OF THE PREFERRED EMBODIMENTS 1. A method for fast tracking control of a benthic AUV's horizontal trajectory described in this embodiment, the method specifically includes the following steps:
[0026] Step 1. Consider model uncertainty and ocean current disturbance as a disturbance aggregate term τ′ d , to establish the kinematics and dynamics equations of the benthic AUV considering the disturbance lumped term;
[0027] Step 2. Based on the kinematics and dynamics equations established in step 1, an error system for trajectory tracking is established using a backstepping control method;
[0028] Step 3: Design a sliding mode disturbance observer based on the trajectory tracking error system established in step 2, and use the designed sliding mode disturbance observer to calculate the disturbance lumped term τ′ d Approximate to obtain the disturbance lumped term τ′ d observation value;
[0029] Step 4. Observation error of disturbance lumped item...
specific Embodiment approach 2
[0035] Specific embodiment 2: The difference between this embodiment and specific embodiment 1 is that in the step 1, the kinematics and dynamics equations of the benthic AUV considering the disturbance lumped item are established, which are specifically:
[0036]
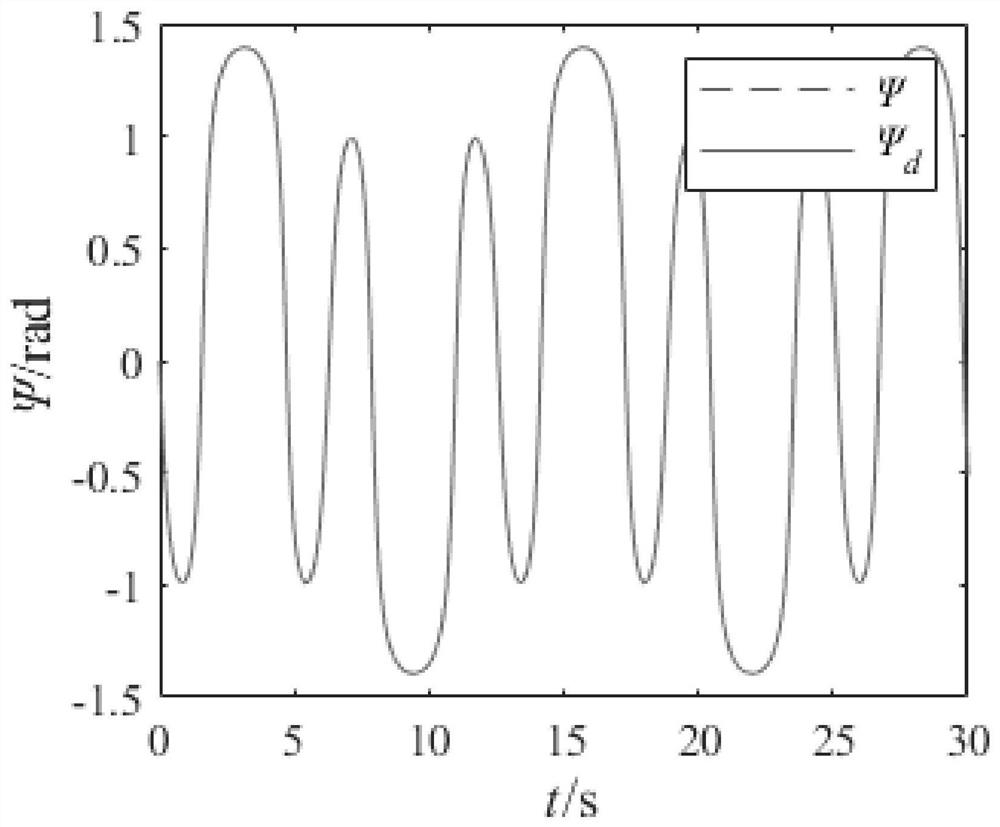
[0037] In the formula, v=[u,v 0 ,r] T , v represents the velocity and angular velocity vector of the benthic AUV in the horizontal plane under the carrier coordinate system, u represents the surge velocity, v 0 represents the sway velocity, r represents the yaw rate; the superscript T represents transposition; η=[x,y,ψ] T Indicates the three-degree-of-freedom pose vector of the benthic AUV in the horizontal plane in the fixed coordinate system, x and y represent the longitudinal and lateral position coordinates of the benthic AUV in the fixed coordinate system, respectively, and ψ represents the heading angle; J( η) represents the coordinate transformation matrix between the fixed coordinate system and the car...
specific Embodiment approach 3
[0042] Specific implementation mode three: the difference between this implementation mode and specific implementation mode two is that the specific process of said step two is:
[0043] Define tracking error:
[0044]
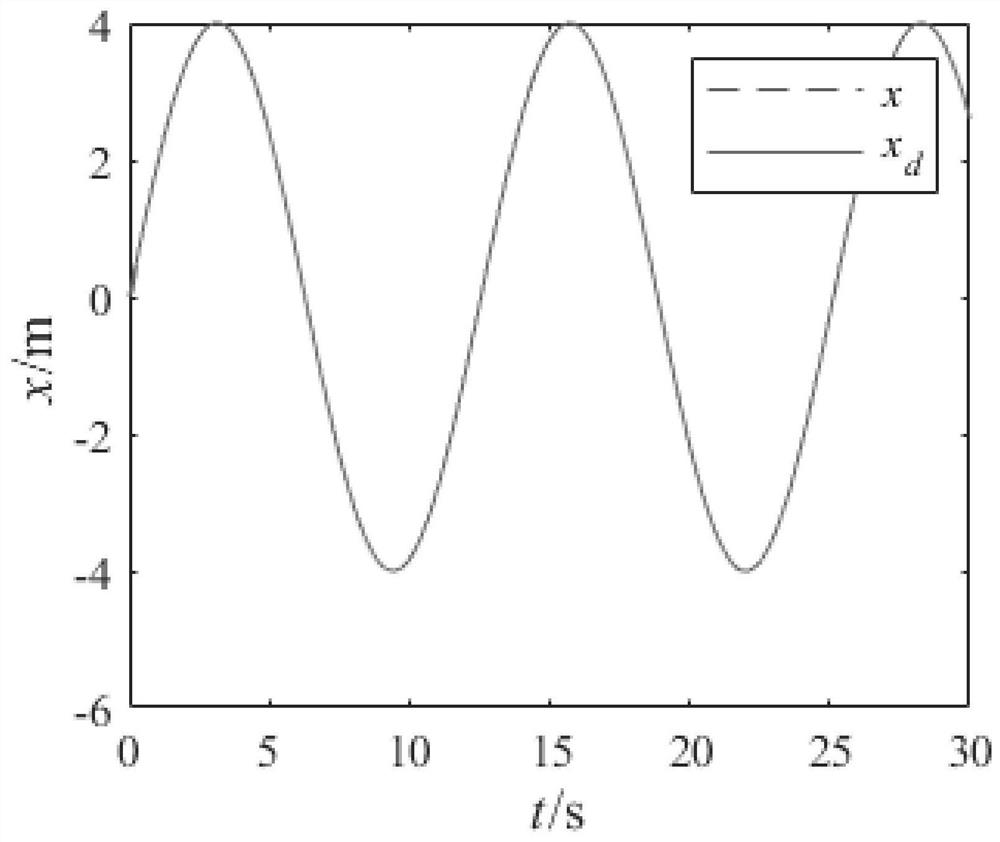
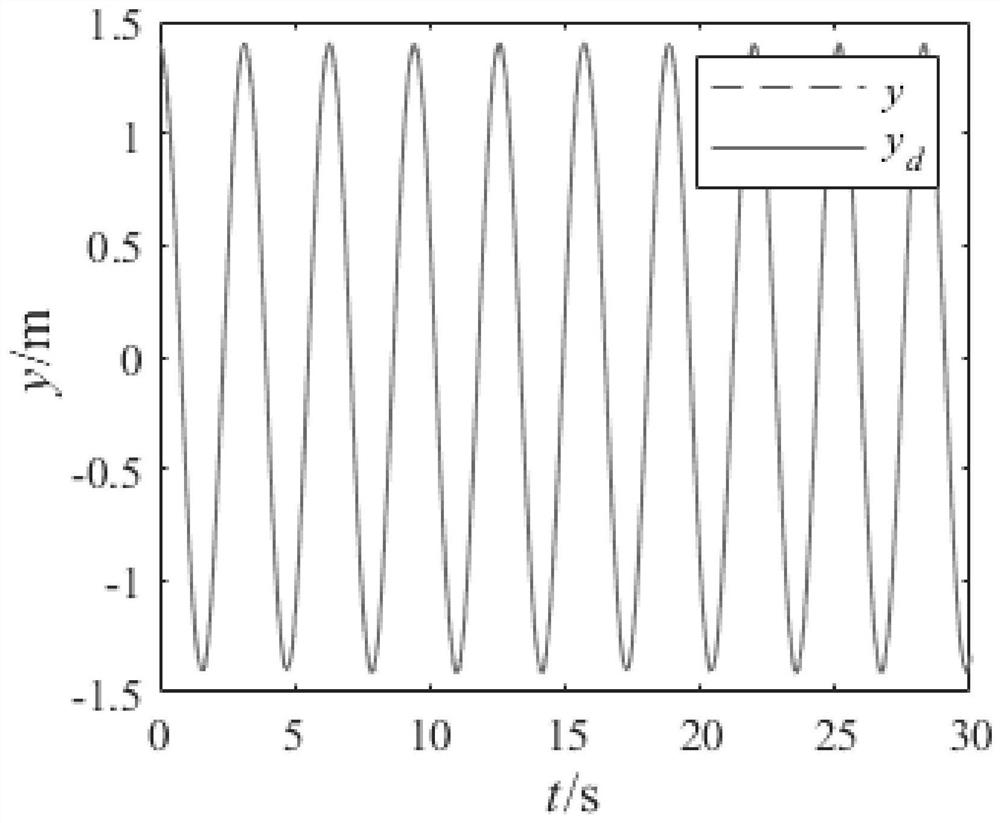
[0045] In the formula, e 1 Indicates the trajectory tracking error; e 2 Indicates the speed tracking error; η d =[x d ,y d ,ψ d ] T Indicates the expected value of the three-degree-of-freedom pose of the benthic AUV in the horizontal plane in a fixed coordinate system, x d is the expected value of x, y d is the expected value of y, ψ d is the expected value of ψ; is η d The first derivative of ; is e 1 The first derivative of ; v d Indicates the expected vector of velocity and angular velocity of the benthic AUV on the horizontal plane in the carrier coordinate system;
[0046] Then the error system for trajectory tracking is established according to formula (2):
[0047]
[0048] In the formula, is e 2 The first derivative of ; is ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More