Multi-sensor target fusion method and device, vehicle and storage medium
A multi-sensor and fusion method technology, applied in the field of vehicle information processing, can solve the problems of redundancy, inability to correctly judge the surrounding environment conditions, contradictions, etc., achieve accurate real-time correct response, and improve the effect of environmental perception
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
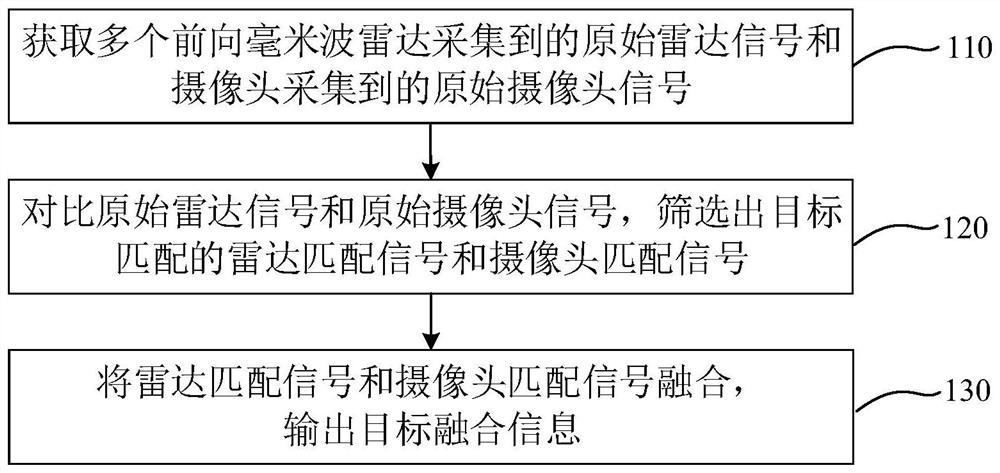
[0026] figure 1 It is a flow chart of a multi-sensor target fusion method provided by Embodiment 1 of the present invention. This embodiment is applicable to a variety of sensor information fusion situations. The method can be executed by a multi-sensor target fusion device, which can be and / or hardware implementation.
[0027] like figure 1 As shown, the method specifically includes the following steps:
[0028] Step 110, acquiring original radar signals collected by multiple forward millimeter-wave radars and original camera signals collected by cameras.
[0029] Among them, the forward millimeter-wave radar and the camera can be set in front of the vehicle to collect road information in front of the vehicle and around the vehicle. There can be multiple forward millimeter-wave radars. For example, the forward millimeter-wave radar can be divided into front long Range millimeter-wave radar, front left mid-range millimeter-wave radar, front right mid-range millimeter-wave r...
Embodiment 2
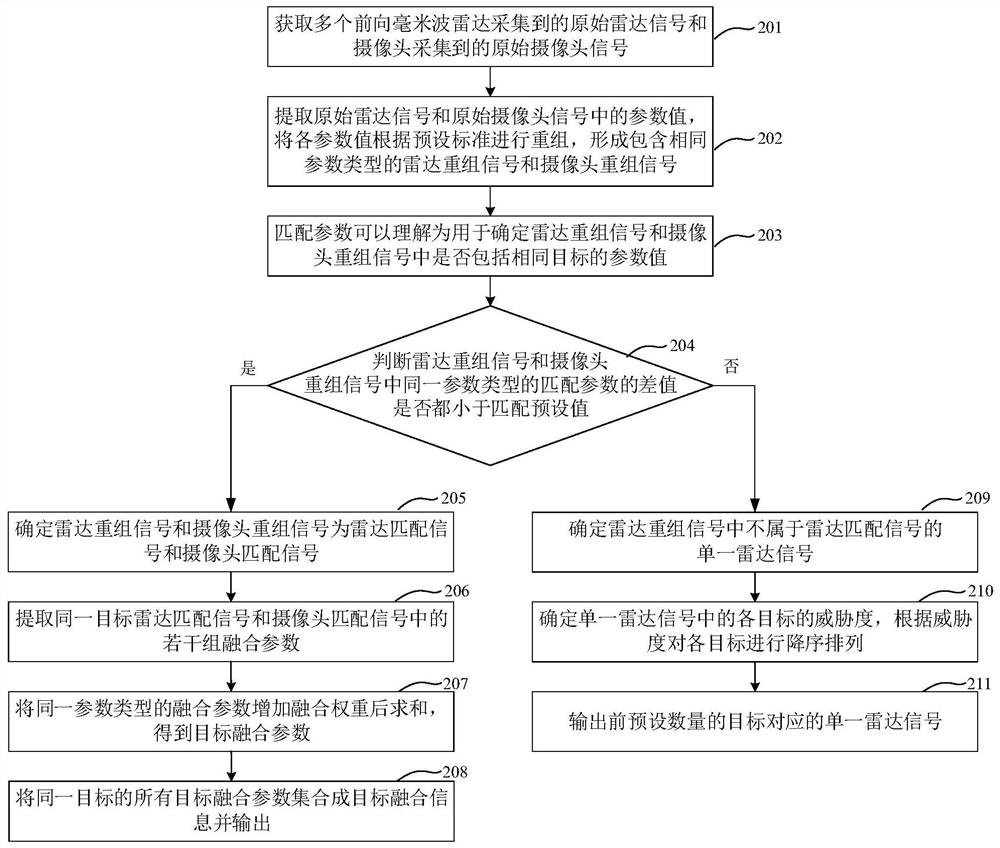
[0044] figure 2 It is a flow chart of a multi-sensor target fusion method provided by Embodiment 2 of the present invention. In this embodiment, on the basis of the foregoing embodiments, the foregoing multi-sensor target fusion method is further optimized.
[0045] like figure 2 As shown, the method specifically includes:
[0046]Step 201, acquiring original radar signals collected by multiple forward millimeter-wave radars and original camera signals collected by cameras.
[0047] Specifically, vehicle road signals collected by multiple forward-facing millimeter-wave radars and cameras arranged in front of the vehicle may be acquired respectively, and defined as original radar signals and original camera signals respectively.
[0048] Step 202, extracting parameter values from the original radar signal and the original camera signal, and reorganizing each parameter value according to a preset standard to form a radar recombined signal and a camera recombined signal co...
Embodiment 3
[0108] The multi-sensor target fusion device provided in the embodiment of the present invention can execute the multi-sensor target fusion method provided in any embodiment of the present invention, and has corresponding functional modules and beneficial effects for executing the method. image 3 It is a structural block diagram of a multi-sensor target fusion device provided in Embodiment 3 of the present invention, as shown in image 3 As shown, the device includes: a signal acquisition module 310 , a signal screening module 320 and a signal fusion module 330 .
[0109] The signal acquisition module 310 is configured to acquire raw radar signals collected by a plurality of forward millimeter wave radars and original camera signals collected by cameras, the forward millimeter wave radars and cameras are arranged in front of the vehicle.
[0110] The signal screening module 320 is configured to compare the original radar signal and the original camera signal, and filter out r...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com