

Floating type self-centering assembling gripper of robot
A robot and floating technology, applied in manipulators, metal processing, metal processing equipment, etc., can solve the problems of damaged assembly quality and low quality of parts to be assembled
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0037] In order to make the technical means, creative features, goals and effects achieved by the present invention easy to understand, the present invention will be further described below in conjunction with specific embodiments.
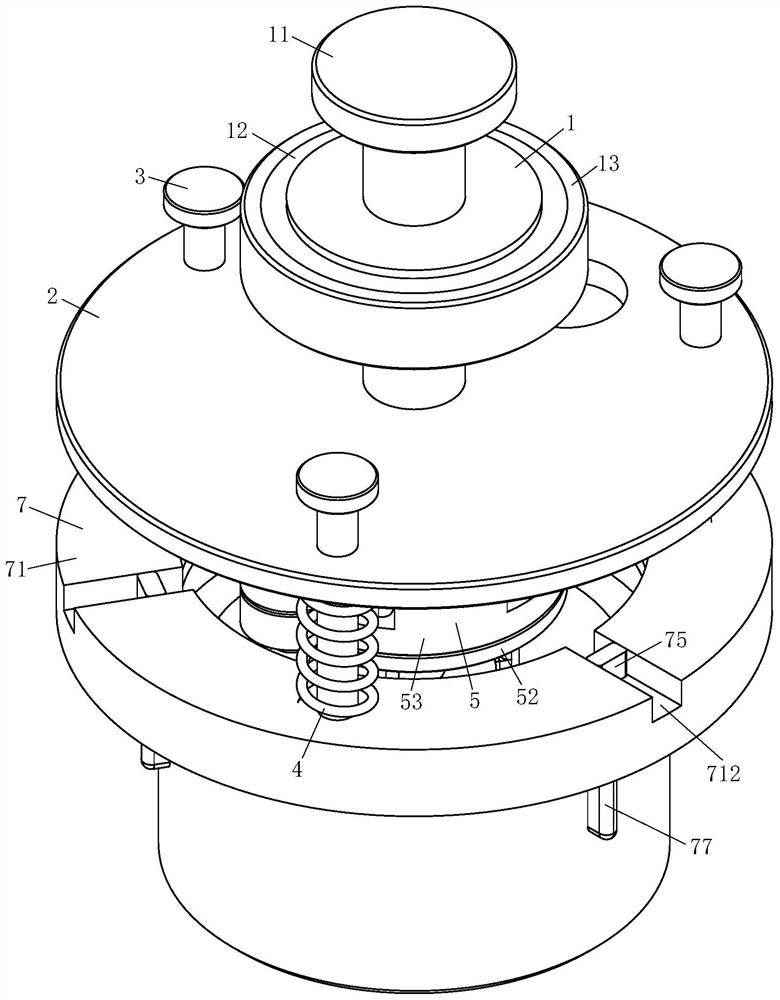
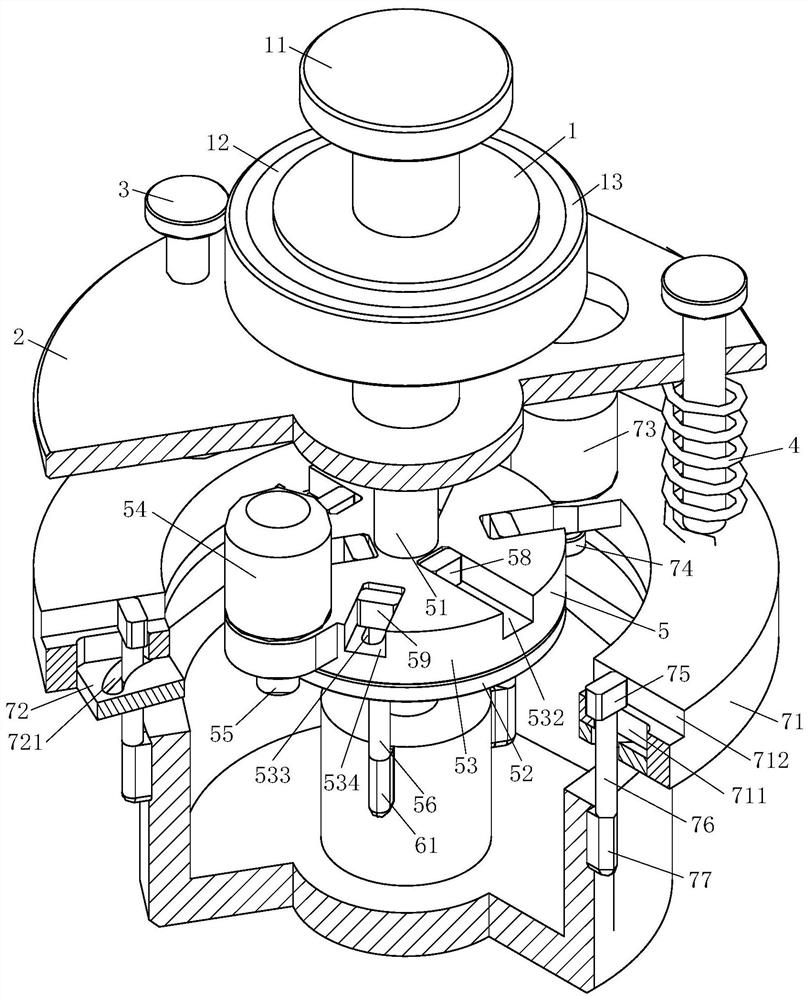
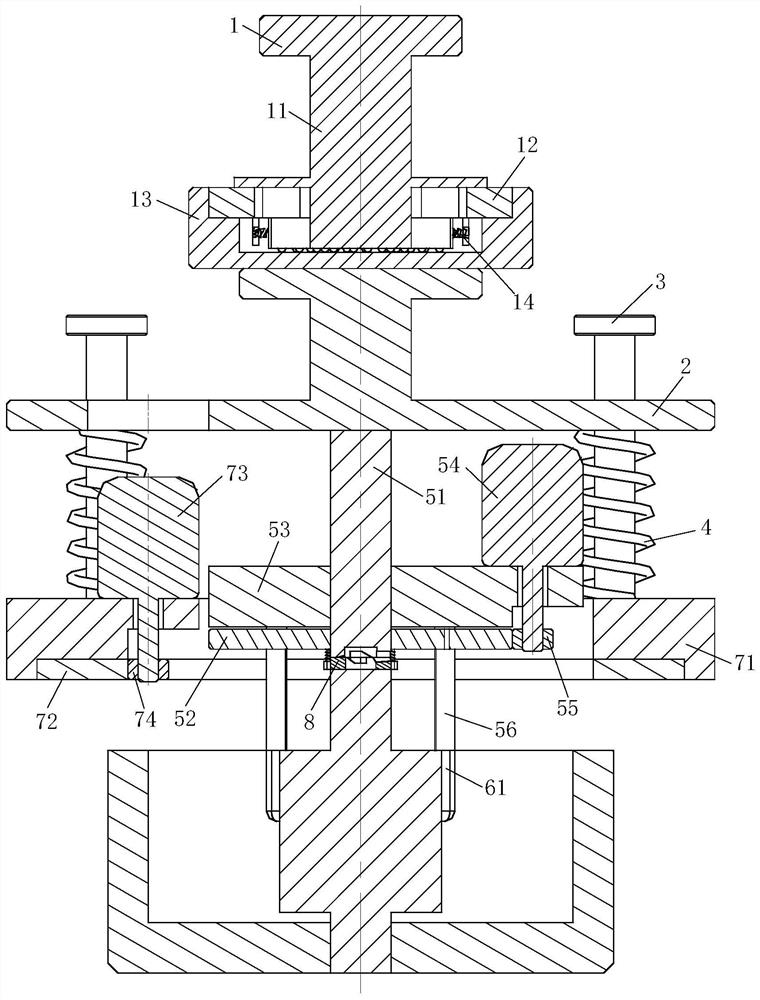
[0038] Such as Figure 1 to Figure 4 As shown, a robot floating self-centering assembly gripper includes a floating part 1, a connecting flange 2, a guide rod 3, a No. 1 spring 4, a clamping part 5 and a positioning clamping part 7; the connecting flange The floating part 1 is arranged above the 2; the floating part 1 is connected to the upper flange surface of the connecting flange 2; the floating part 1 is used to maintain a floating connection between the assembly gripper and the robot; the The guide rods 3 are evenly spaced along the circumferential direction on the flange surface of the lower end of the connecting flange 2; the guide rods 3 are slidably connected to the connecting flange 2; Tightening part 7; the positioning clamping part 7 ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More