Aircraft flight path rapid planning optimization method based on genetic algorithm
A genetic algorithm and optimization method technology, applied in the field of aircraft track optimization, can solve problems such as mission failure and inability of the positioning system to accurately locate
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
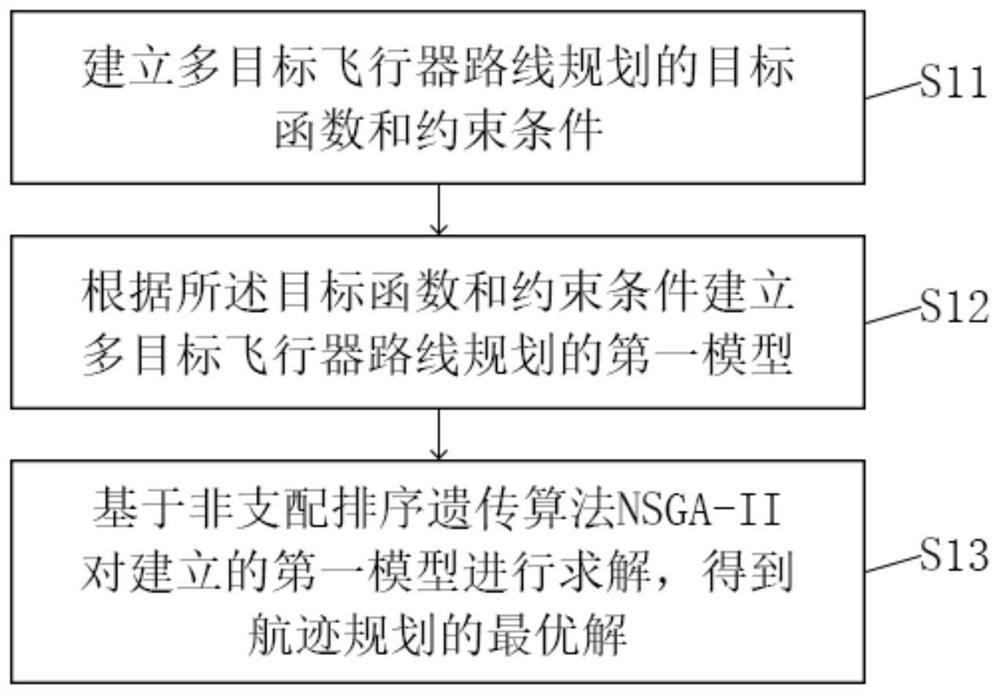
[0078] This embodiment provides a method for fast planning and optimization of aircraft track based on genetic algorithm, such as figure 1 shown, including steps:
[0079] S11. Establishing the objective function and constraint conditions of multi-objective vehicle route planning;
[0080] S12. Establishing a first model for multi-objective aircraft route planning according to the objective function and constraints;
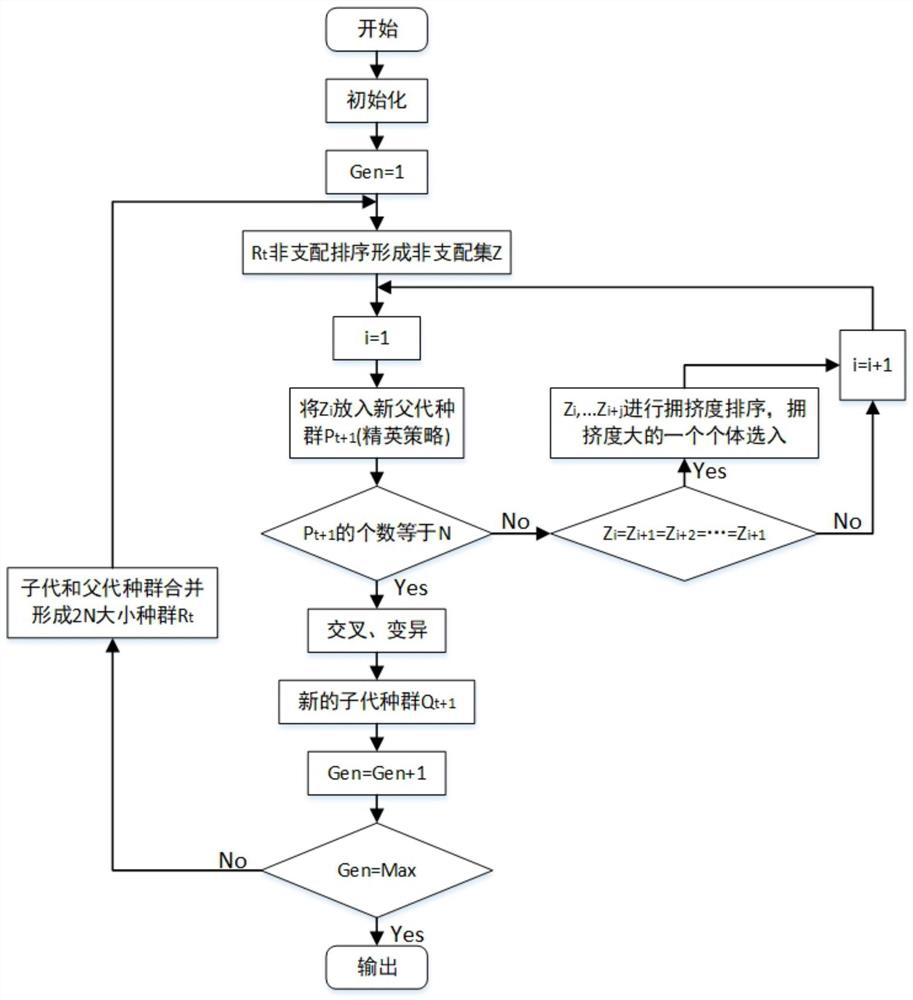
[0081] S13. Based on the non-dominated sorting genetic algorithm NSGA-II, the established first model is solved to obtain the optimal solution of the flight path planning.
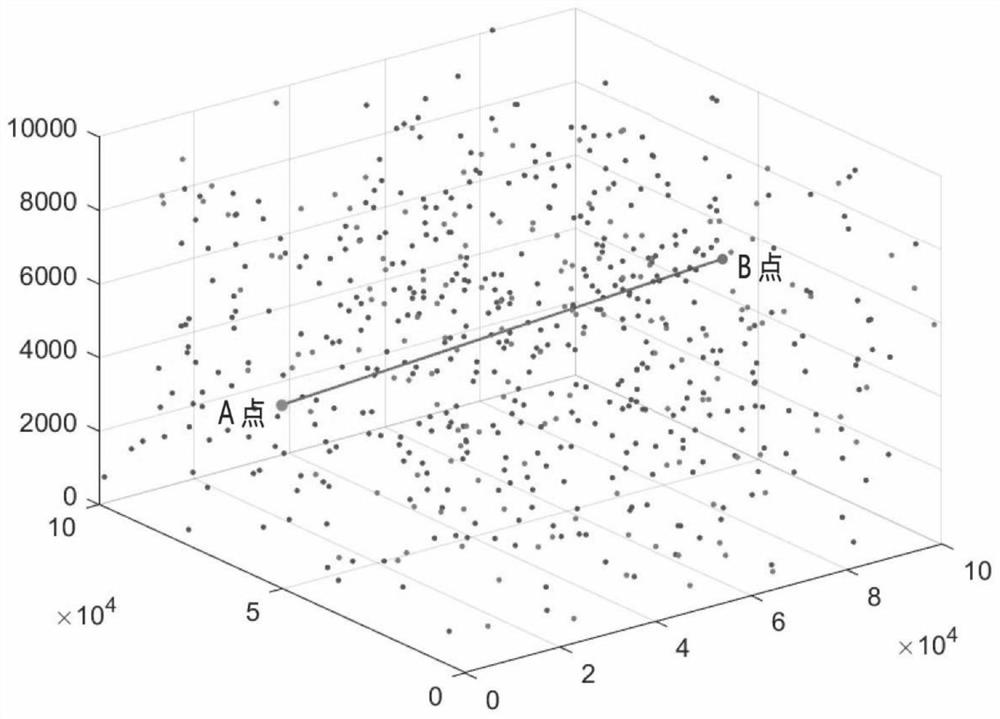
[0082] This embodiment requires that the best calibration flight route be drawn up for the intelligent aircraft to ensure that its position error can be corrected in time during the flight and continue to fly according to the specified track. At the same time, the proposed route also needs to meet the corresponding constraints of the problem. Make the track length of the aircraft as small a...
Embodiment 2
[0141] The differences between the genetic algorithm-based fast planning and optimization method for aircraft track provided in this embodiment and the first embodiment are:
[0142] In this embodiment, on the basis of the first model, the trajectory planning of the aircraft with the turning radius is considered, and the second model is obtained. The specific steps are:
[0143] S11. Establishing the objective function and constraint conditions of multi-objective vehicle route planning;
[0144] S12. Establishing a first model for multi-objective aircraft route planning according to the objective function and constraints;
[0145] S13. Add the constraint condition of the minimum turning radius of the aircraft itself into the first model to obtain the second model of the route planning of the multi-objective aircraft;
[0146] S14. Solve the established second model based on the non-dominated sorting genetic algorithm NSGA-II, and obtain an optimal solution for flight path pla...
Embodiment 3
[0177] The differences between the genetic algorithm-based fast planning and optimization method for aircraft track provided in this embodiment and the first embodiment are:
[0178] This embodiment considers the flight loop that will change dynamically over time. Even if the correction points have been determined before the flight of the aircraft, the aircraft may not be able to achieve the ideal correction when performing error correction at some correction points (abbreviated as abnormal points). The error is precisely corrected to 0. The probability that the abnormal point can successfully correct the error of a certain state to 0 is 80%. If the correction fails, the remaining error after correction is min(error 校正前 ,5) units. Considering that there is a correction failure in the abnormal point, the probability of successfully reaching the terminal is as large as possible, and a three-objective optimization model is established (the track is as short as possible, the numb...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com