An active sonar target motion information fusion method
A motion information and fusion method technology, applied in the direction of sound wave re-radiation, instruments, measuring devices, etc., can solve the problems of slow target tracking, misidentification of reverberation interference as a target, poor real-time performance, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
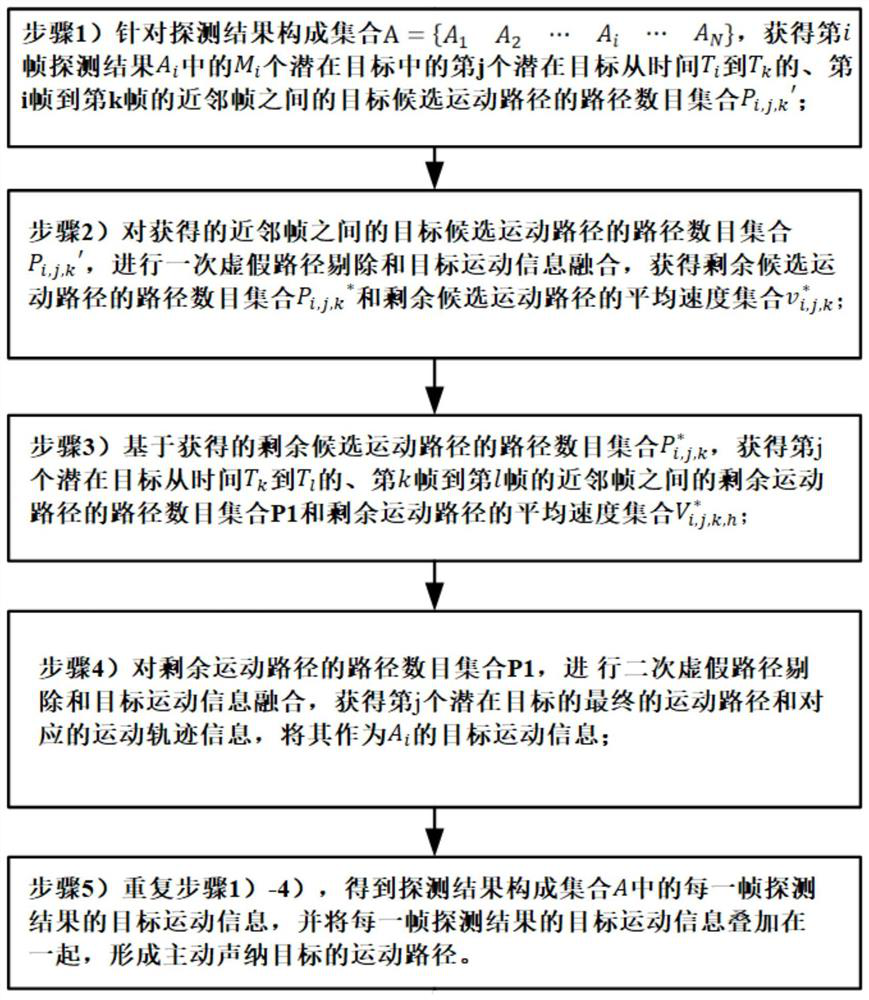
[0084] Such as figure 1 As shown, the present invention provides a method for fusion of active sonar target motion information, the method comprising:
[0085] Step 1) Construct a set A={A for the detection results 1 A 2 …A i …A N}, get the i-th frame detection result A i M in i The j-th potential target among the potential targets starts from time T i to T k The path number set P i,j,k ';
[0086] Specifically, assuming that a station continuously transmits N pulse signals in total, the transmission times corresponding to the N pulse signals continuously transmitted by the station are respectively T={T 1 T 2 …T i …T N}; Its corresponding detection results of each frame form a set A={A 1 A 2 …A i …A N};
[0087] Among them, A i is the detection result of frame i; A i is an M i Row 4 column eigenvector matrix:
[0088]
[0089] Among them, M i for A i The number of potential target points contained in ; x i,j 、y i,j , θ i,j and A respectiv...
Embodiment 2
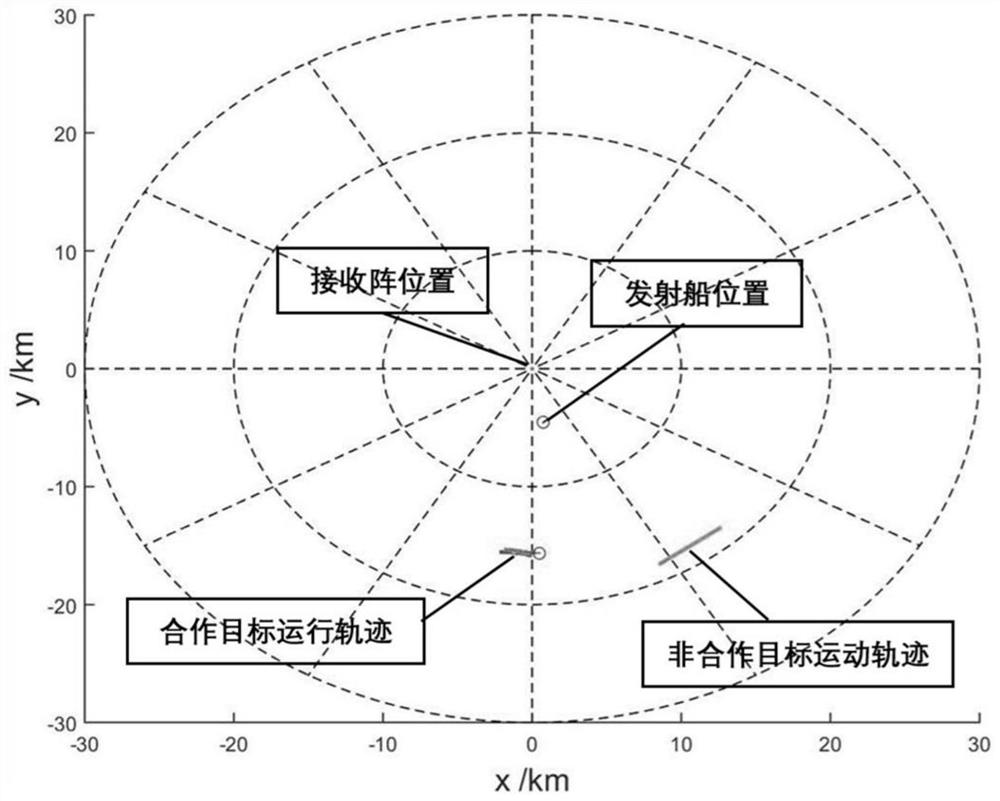
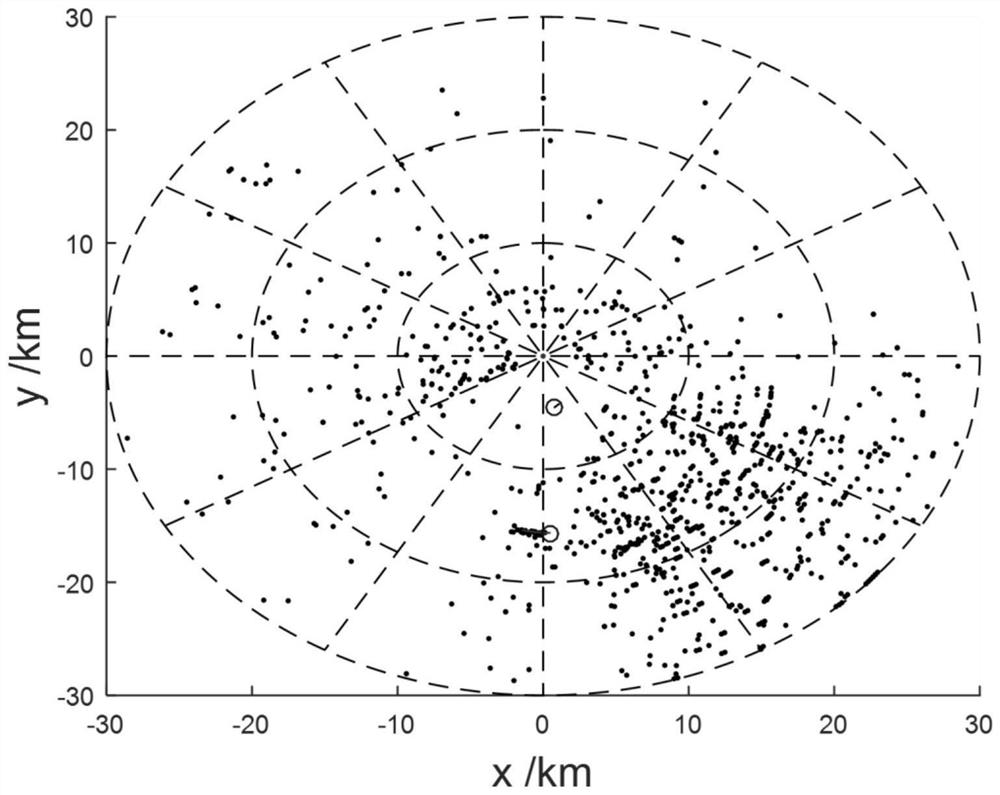
[0146] A shallow sea bistatic active sonar detection test carried out in a certain sea area in April 2018 is used to illustrate. In the sea test, the transducer was used as the sound source, and a total of 8 pulse signals were transmitted at a certain station. The time T of each pulse signal relative to the time of the first pulse signal transmission was 0 seconds, 120 seconds, 341 seconds, 541 seconds, 891 seconds, 1231 seconds, 1731 seconds and 2301 seconds; the underwater submerged body of the "Experiment No. 1" catamaran was used as the cooperative target; the array receiving the signal was located on the seabed. After preprocessing, the detection results of each frame form a set as follows:
[0147] A={A 1 A 2 …A i …A 8};
[0148] The number of potential targets contained in the detection results of each frame are 51, 40, 69, 81, 294, 271, 84, 103;
[0149] Assume that the maximum movement speed of the potential target is v max = 8 knots; the maximum value of po...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More