

Time parameterized route planning method and system for unmanned aerial vehicle in unknown environment
A technology with time parameters and unknown environment, applied in the field of unmanned aerial vehicles, it can solve the problems of waste, inconsistent number of control points, unsatisfactory routes, etc., and achieve the effect of smooth spatial position and speciality.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0025] The present invention will be further described below in conjunction with the description of the drawings and specific embodiments.
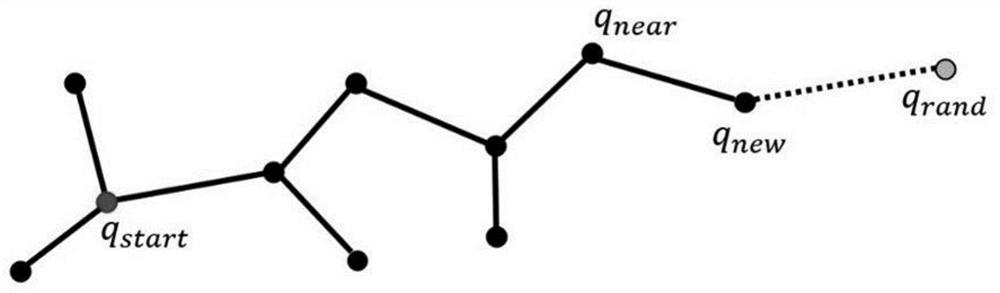
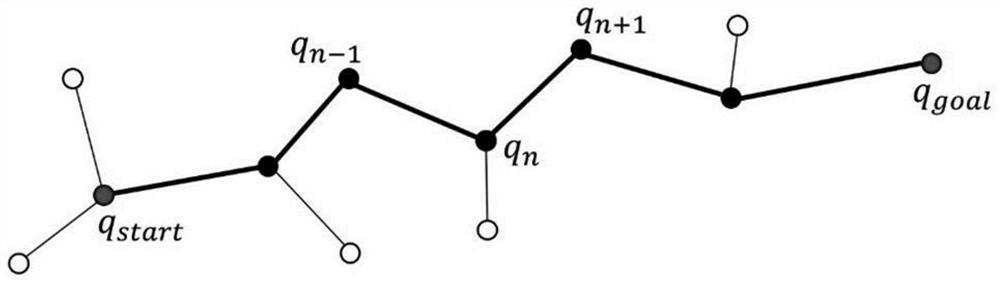
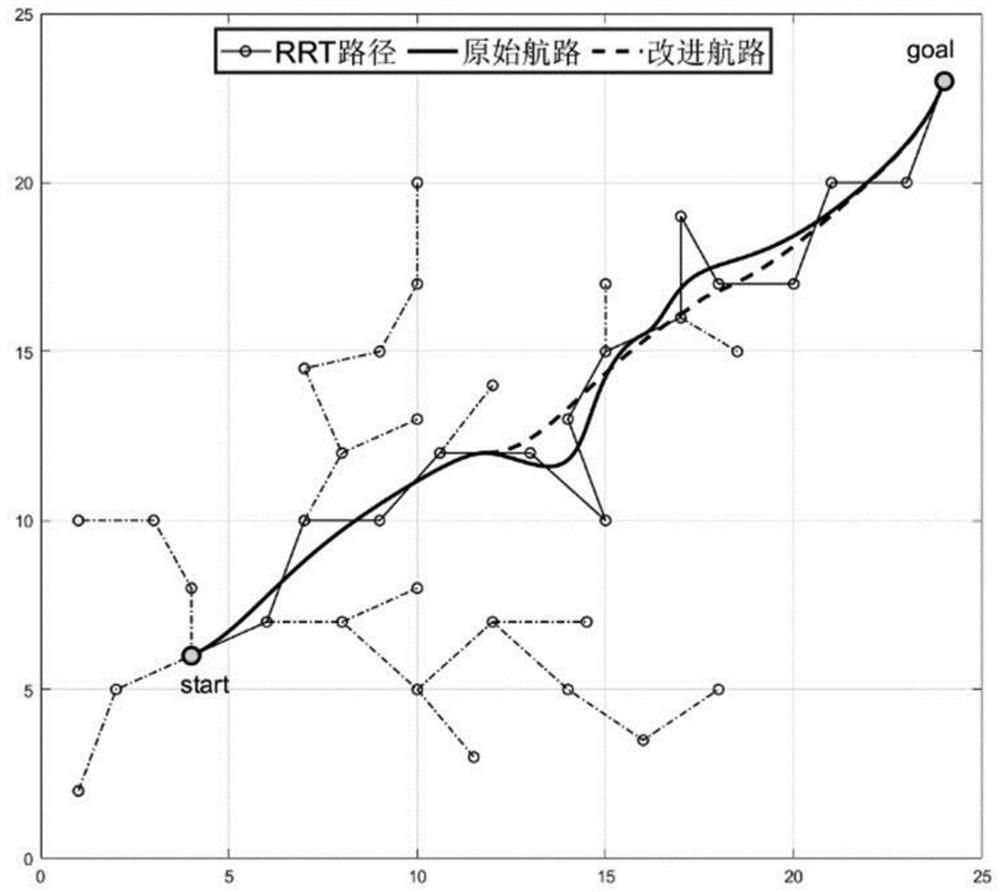
[0026] A time-parameterized route planning method for UAVs in an unknown environment. First, the sampling-based Rapidly Extended Random Tree (RRT) algorithm is used to search for feasible paths in an unknown environment. After judging the contribution rate of sampling points, the redundant point Eliminate, and then use the segmented Bezier curve function to fit and smooth the RRT path to obtain the space route. Then, the time parameterized optimization of this space route is carried out, so that the route has the nature of the UAV route, and the trade-off between the route execution time and the route state output is achieved by introducing a weight factor. Finally, a time-parameterized route planning method for UAVs in unknown environments is designed.
[0027] 1. Route planning scheme in unknown environment
[0028] The route planning...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More