

Wheel type omnidirectional claw wall-climbing robot and moving method thereof
A wall-climbing robot and claw technology, applied in the direction of motor vehicles, wheels, transportation and packaging, etc., can solve the problems of inability to move horizontally, and achieve the effect of fast crawling speed, convenient control and increased gripping force
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0016] Describe in detail with reference to the accompanying drawings
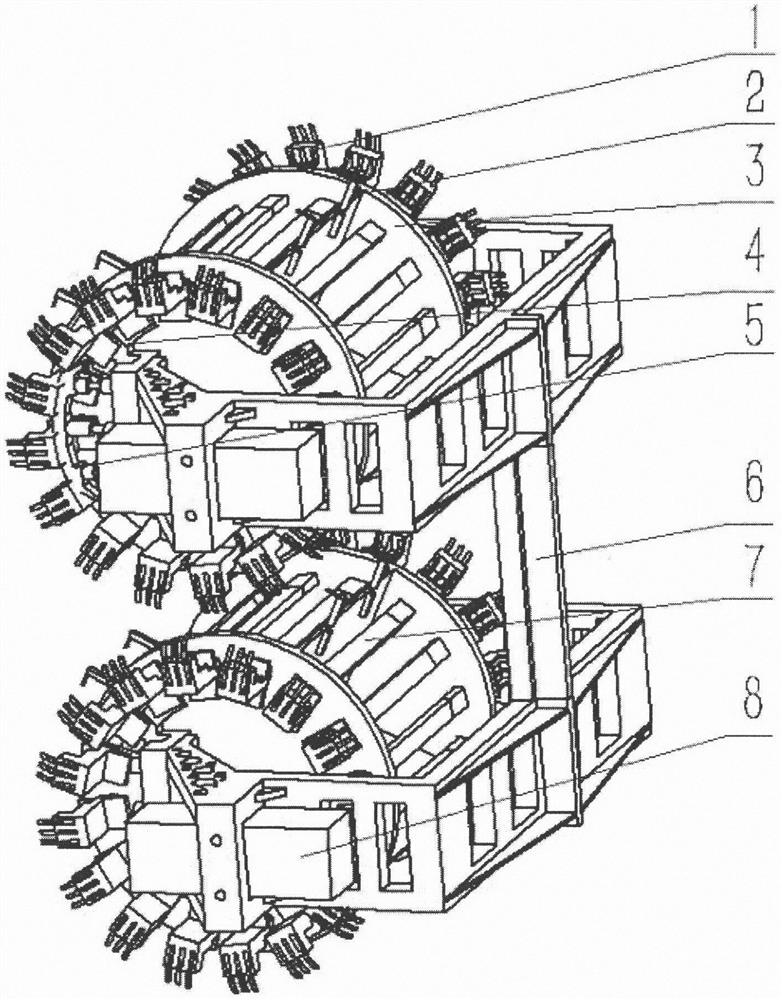
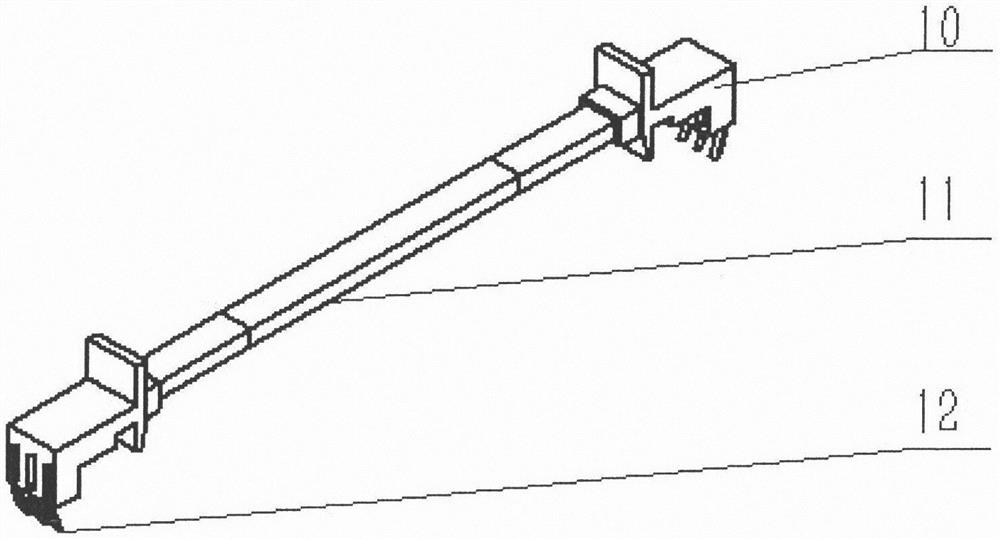
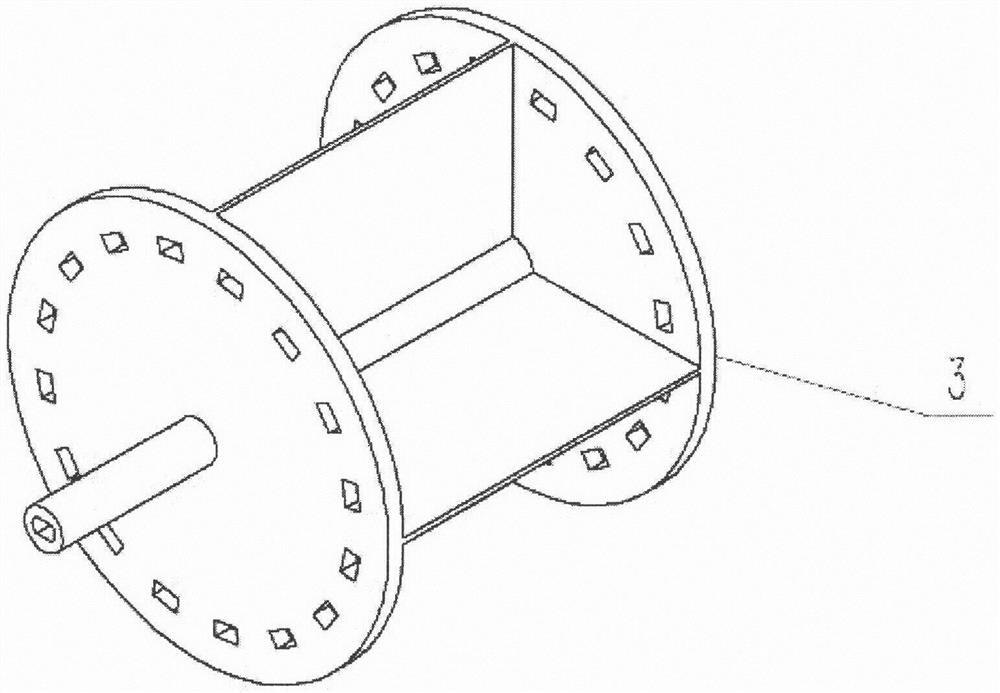
[0017] combine figure 1 and Figure 7 , the wheeled omnidirectional hook wall-climbing robot consists of two omnidirectional wheeled hook modules installed on the frame. The composition of the robot includes a frame 6, a DC motor 8 and a boss base 4 are installed on the frame. An extruding rod 5 is installed at the bottom of the boss base, and the runner 3 is installed on the output shaft of the DC motor. At least two longitudinal soft hooks 2 are arranged on the runner support plate. The number of soft hooks can be adjusted according to the Select the appropriate number of support plates in the middle, and there are 16 pairs of horizontal hooks 1 installed on both sides of the runner. The number of horizontal hooks can be selected according to the needs of the radius of the runner. figure 2 The composition of the horizontal claws includes a metal sharp hook 12 installed on the top of the horizontal cla...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More