

Point cloud feature space representation method for laser SLAM
A space table and point cloud technology, applied in the direction of instruments, character and pattern recognition, computer components, etc., can solve complex scene recognition problems, do not consider local geometric features and semantic context features, scene fast static assumptions cannot be satisfied, etc. question
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
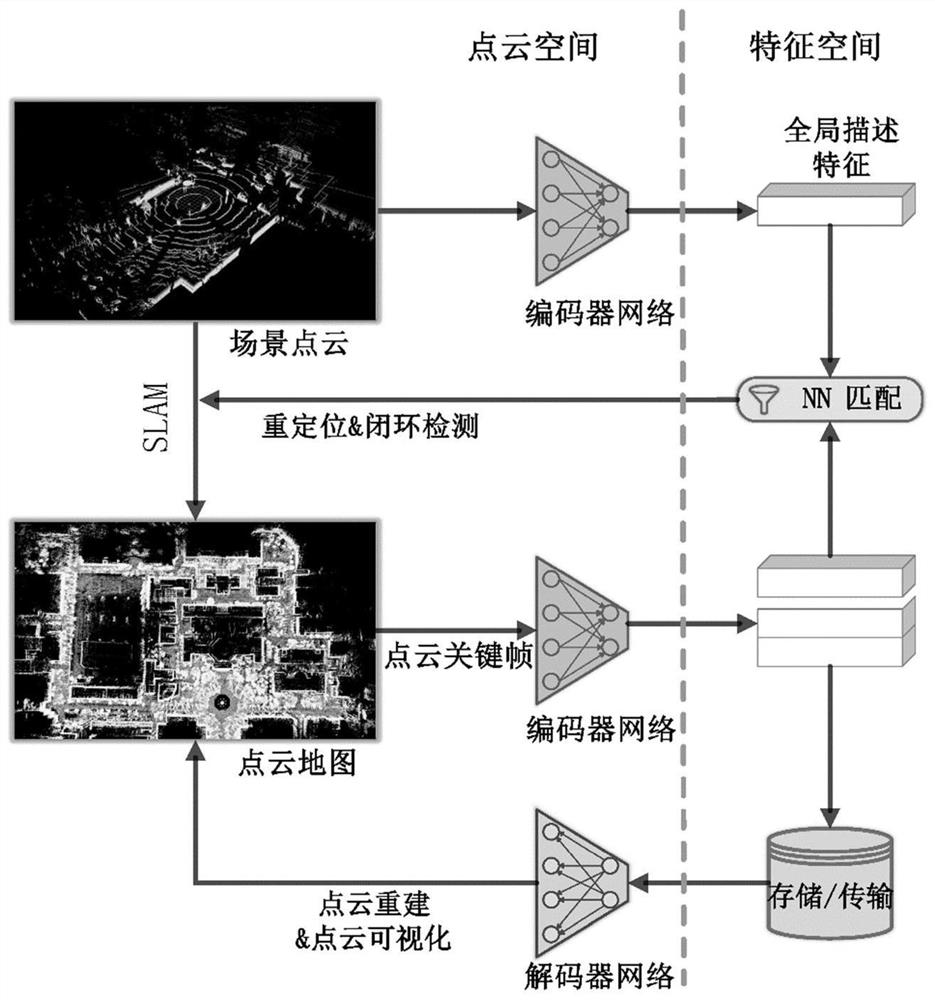
[0041] Such as figure 1 As shown, a point cloud feature space representation method for laser SLAM includes the following steps:
[0042] Step 1: Perform preprocessing such as filtering and downsampling on the point cloud samples in the point cloud dataset, and construct training point cloud sample pairs according to the similarity of the point cloud scene, including the positive sample p pos with negative samples p neg .
[0043] The similarity of the training sample pair is determined by the auxiliary judgment of the position coordinates of the samples in the map. The position interval within 10m is regarded as a positive sample with similar structure, and the distance between 10m and 50m is regarded as a negative sample selection range, and the negative sample is randomly selected. , the randomly selected samples at a distance of 50 meters are regarded as extremely dissimilar extremely negative samples.
[0044] Specifically: select the Oxford RobotCar dataset, use the p...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More