

Vehicle returning detection method, system and device
A vehicle and direction angle technology, applied in the field of intelligent transportation, can solve the problems of reduced use area of the return area, reduced utilization efficiency of the return area, and low positioning accuracy.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
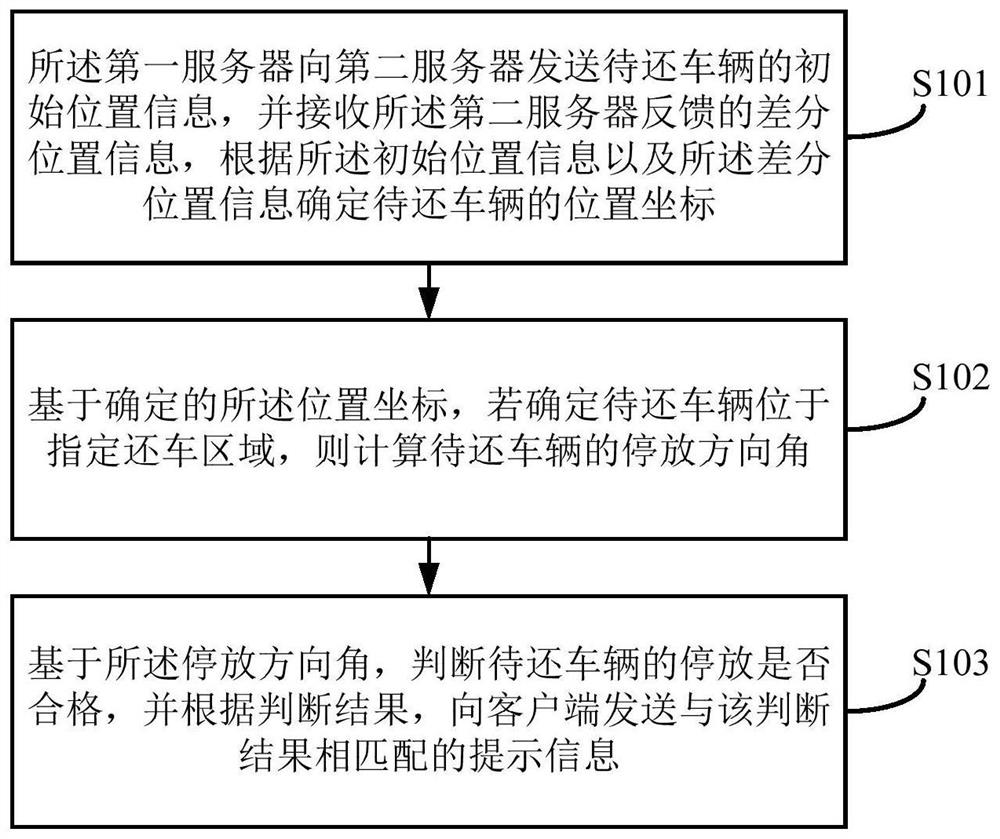
[0103] figure 1 It shows a schematic flow chart of the method for returning the vehicle detection provided by the embodiment of the present application, the method is applied to the first server, and the method includes steps S101-S103; specifically:
[0104] S101. The first server sends the initial position information of the vehicle to be returned to the second server, and receives the differential position information fed back by the second server, and determines the position of the vehicle to be returned according to the initial position information and the differential position information. Position coordinates.
[0105] It should be noted that, when the second server feeds back the differential location information, it performs corresponding feedback according to the identification information of the sender of the initial location information. As the sender of the initial position information, the first possible implementation is: the first server can be set on the vehi...
Embodiment 2
[0154] Figure 7 It shows a schematic flow diagram of the system for returning the vehicle detection provided by the embodiment of the present application, the system includes: a client 701, a first server 702 and a second server 703, the first server 702 and each of the clients 701 A communication connection, the first server 702 is connected to the second server 703 by communication;
[0155] The first server 702 is used to send the initial position information of the vehicle to be returned to the second server 703, and receive the differential position information fed back by the second server 703, according to the initial position information and the differential position information , determine the location coordinates of the vehicle to be returned;
[0156] The first server 702 is configured to calculate the parking direction angle of the vehicle to be returned if it is determined that the vehicle to be returned is located in a designated return area based on the determ...
Embodiment 3
[0184] Figure 8 It shows a schematic flow diagram of the device for returning the vehicle detection provided by the embodiment of the present application. The device is applied to the first server, and the device includes:
[0185] The positioning module 801 is used for the first server to send the initial position information of the vehicle to be returned to the second server, and receive the differential position information fed back by the second server, and determine according to the initial position information and the differential position information The location coordinates of the vehicle to be returned;
[0186] The data processing module 802 is configured to calculate the parking direction angle of the vehicle to be returned if it is determined that the vehicle to be returned is located in the designated return area based on the determined position coordinates;
[0187] The data transmission module 803 is configured to judge whether the parking of the vehicle to be...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More