

Wall-climbing robot foot pad based on electromagnetic attraction
A technology of wall-climbing robots and foot pads, which can be used in motor vehicles, transportation and packaging, etc., and can solve the problems of small adsorption force and high voltage of wall-climbing robots
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0025] In order to make the purpose, technical solution and advantages of the present invention clearer, the following will further describe in detail the embodiments of the present invention and their beneficial effects in conjunction with the accompanying drawings.
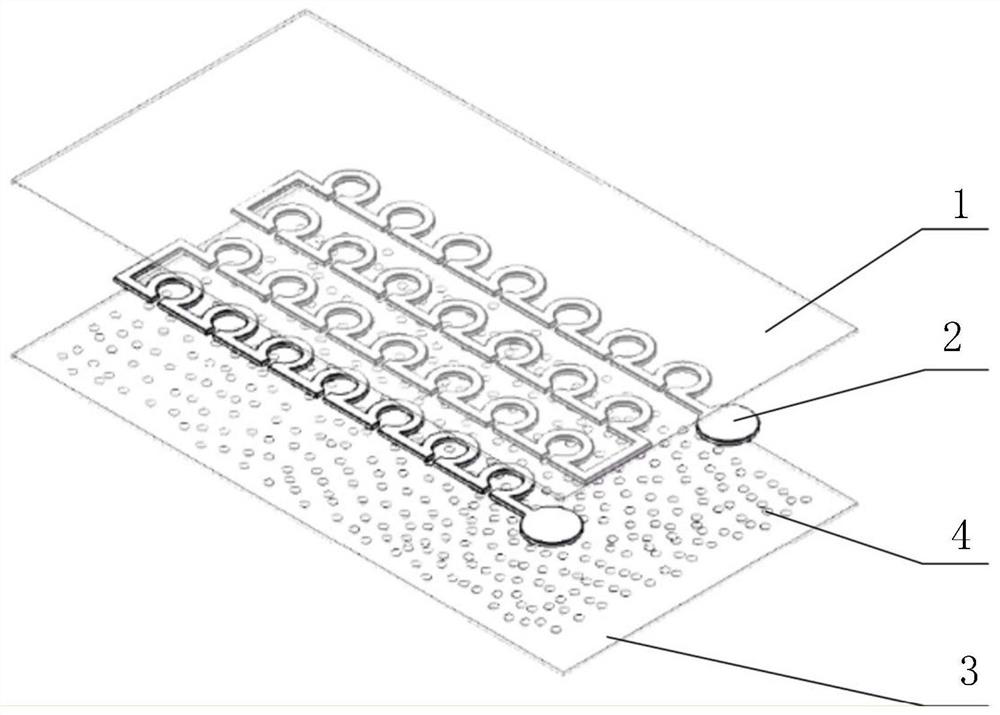
[0026] Such as figure 1 and figure 2 As shown, an embodiment of the present invention provides a wall-climbing robot foot pad based on electromagnetic adsorption for a wall-climbing robot. The wall-climbing robot foot pad is arranged on the sole of the wall-climbing robot as an adsorption device for the wall-climbing robot.
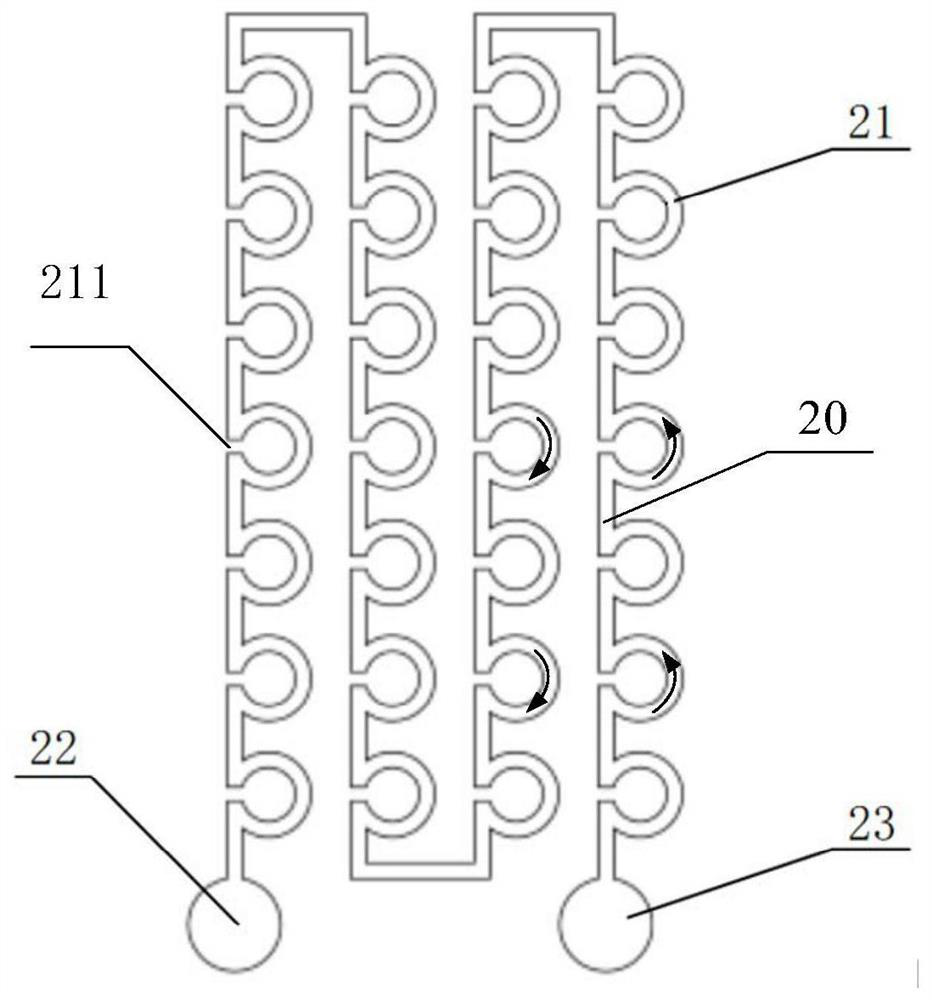
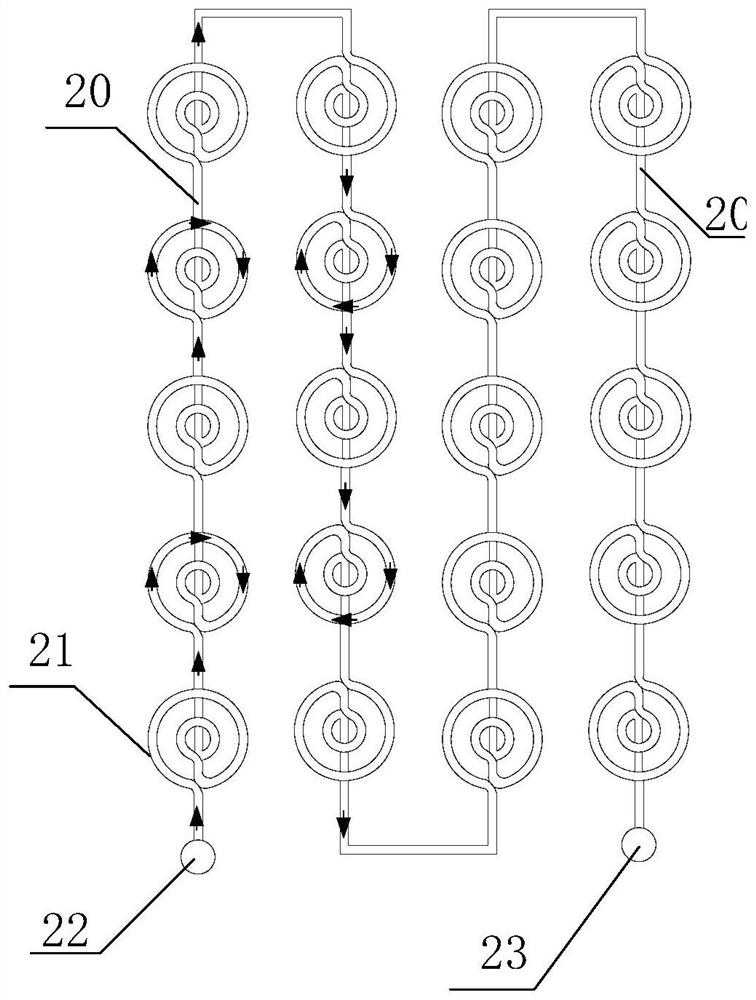
[0027] The foot pad of the wall-climbing robot includes: an adsorption layer 3 and an energized wire 2, wherein a number of ferromagnetic particle groups 4 are distributed on the adsorption layer 3, each ferromagnetic particle group 4 includes a plurality of ferromagnetic particles, and the energized wire 2 is laid on the adsorption layer 3, at least one ring structure 21 is provided on t...
PUM
| Property | Measurement | Unit |
|---|---|---|
| Thickness | aaaaa | aaaaa |
Abstract
Description
Claims
Application Information
 Login to View More
Login to View More