

Indoor following robot system and operation method
A technology for following robots and robots, which is applied in manipulators, program-controlled manipulators, manufacturing tools, etc., and can solve problems such as poor following performance
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0068] The present invention is described in detail below in conjunction with examples, but the present invention is not limited to these examples.
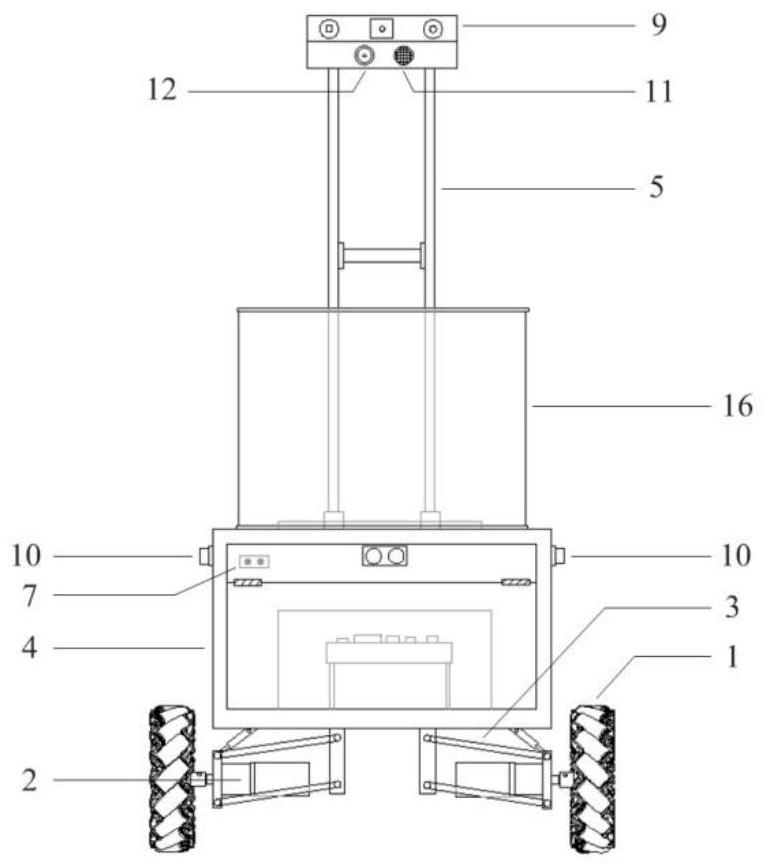
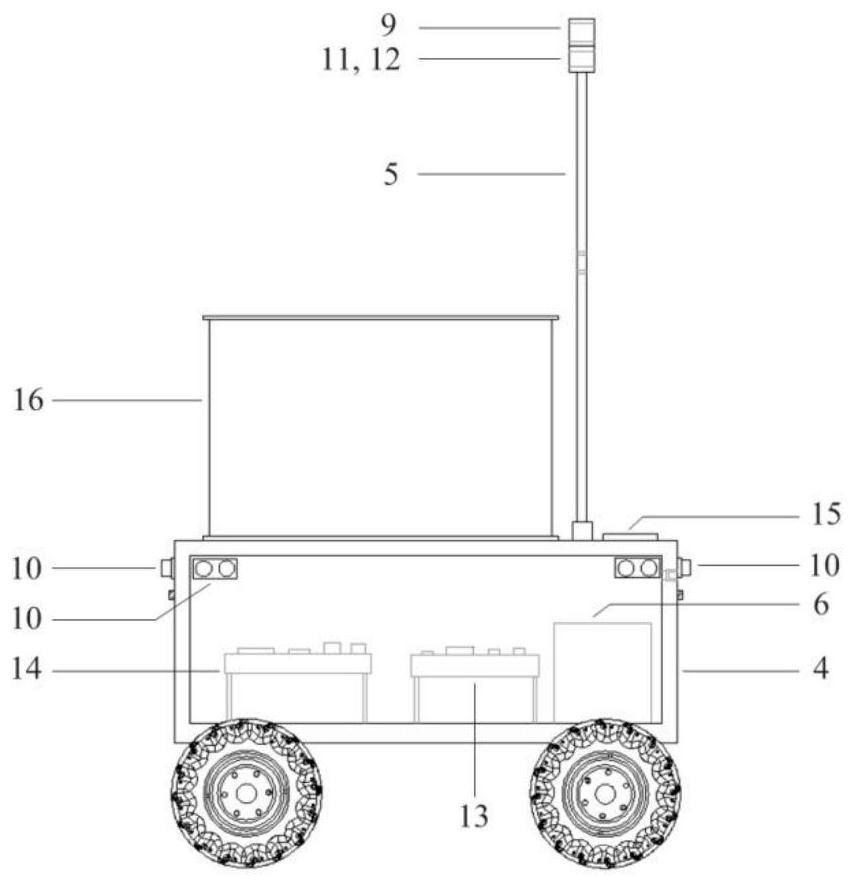
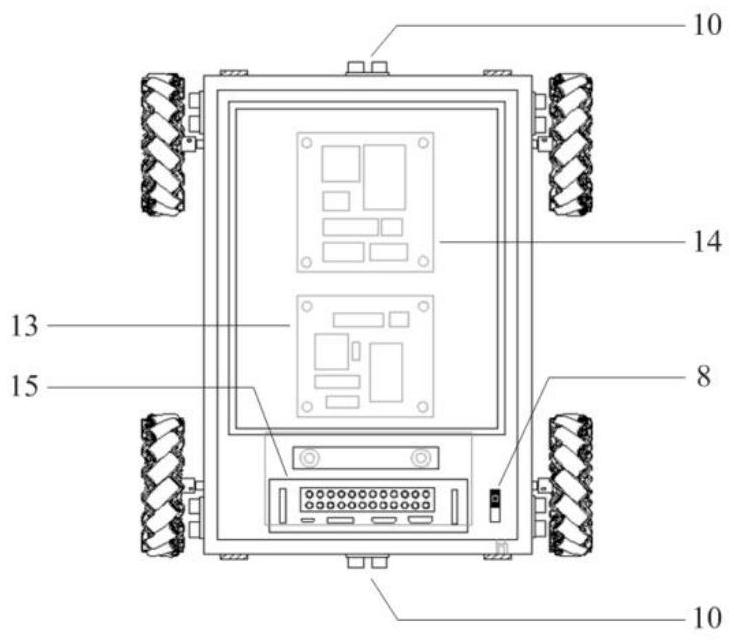
[0069] The indoor following robot system of the present invention includes a structure subsystem and a voice interaction subsystem, a perception subsystem, an intelligent planning subsystem, an omnidirectional motor control subsystem and a power supply subsystem built on it.
[0070] The human-machine voice interaction subsystem is used to obtain voice information and send the voice information to the intelligent planning subsystem; the human-machine voice interaction subsystem in the present invention includes a microphone and a loudspeaker.
[0071] The perception subsystem in the present invention is used to obtain perception information, the perception information includes the RGB-D image of the environment in front of the robot and the obstacle position information around the robot, and sends the perception information to the...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More