

Method for densifying monocular SLAM feature point map
A feature point, single-purpose technology, applied in the field of densified monocular SLAM feature point map, can solve the problems of inability to move flexibly, unable to navigate with surgical robots, etc., and achieve the effect of precise navigation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0038] The present invention will be further described below in conjunction with the accompanying drawings and specific embodiments, so that those skilled in the art can better understand the present invention and implement it, but the examples given are not intended to limit the present invention.
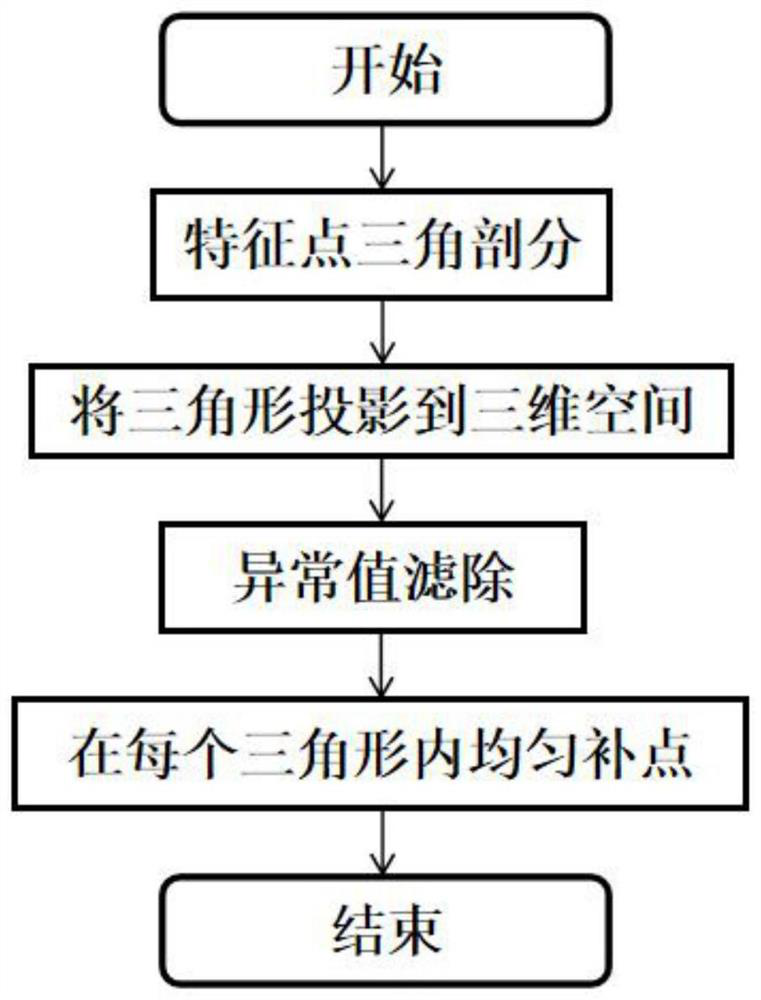
[0039] refer to figure 1 As shown, the present invention discloses a dense monocular SLAM feature point map method, comprising the following steps:
[0040] S1. Delaunay triangulation is performed on the feature points in the key frame of each frame to obtain the key frame after triangulation.
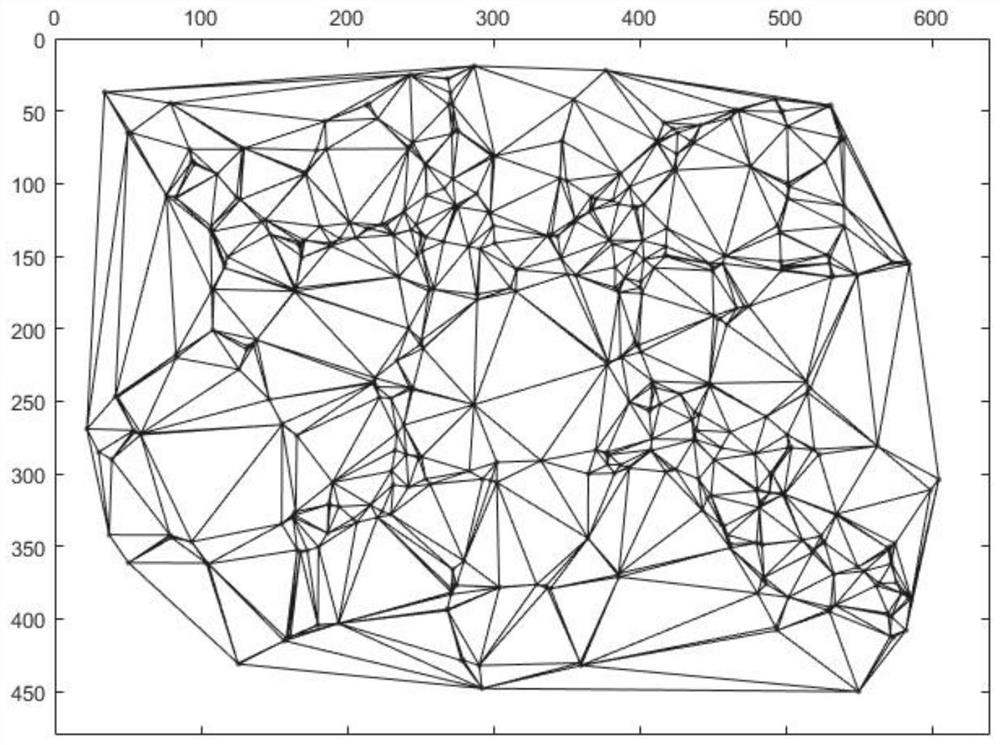
[0041] Such as figure 2 Shown is the Delaunay triangulation performed on the pixel plane by the feature points in the key frame of the first frame.
[0042] The key frame in this step is the key frame selected during the monocular SLAM operation, and the Delaunay triangulation is a two-dimensional triangulation on the pixel plane of the key frame.
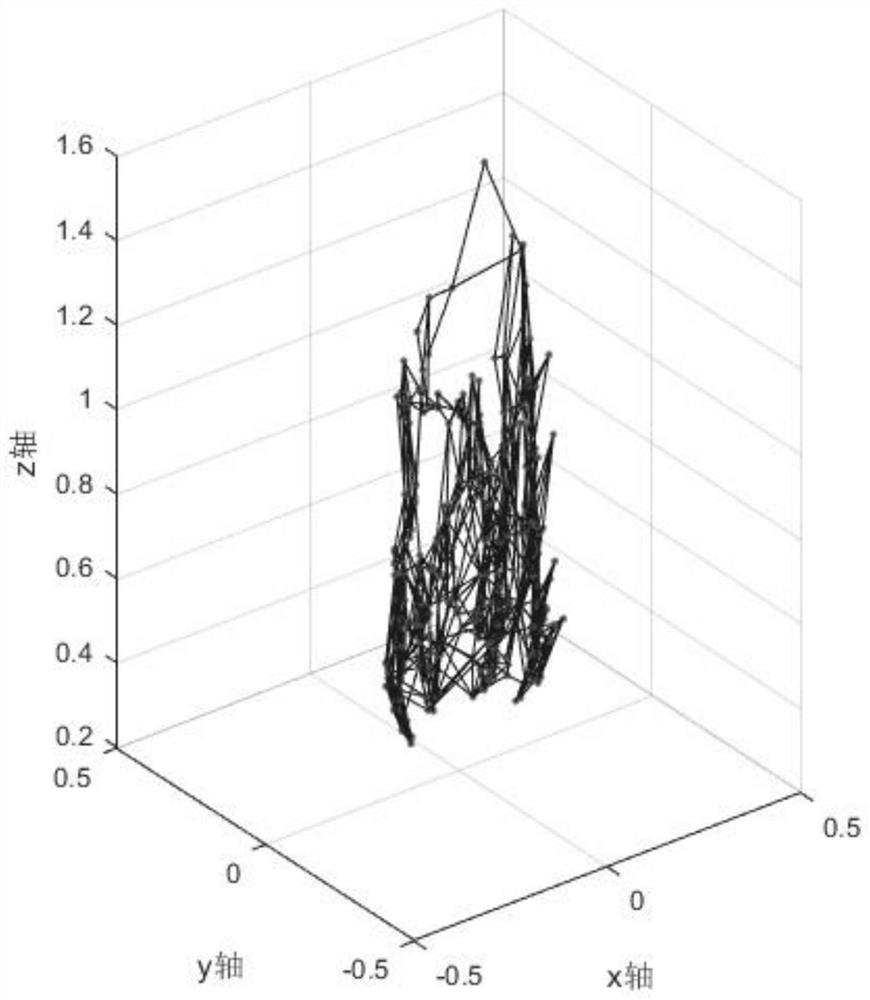
[0043] S2. Project the triangulated ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More