Path planning method based on structured data
A structured data and path planning technology, applied to road network navigators, measuring devices, instruments, etc., can solve the problems of not being able to obtain the optimal solution, and cannot guarantee the optimal path, etc., to solve performance bottlenecks, occupy less resources, and Responsive Effects
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0047] In order to further explain the technical solution of the present invention, the present invention will be described in detail below through specific examples.
[0048] A path planning method based on structured data, the method process includes
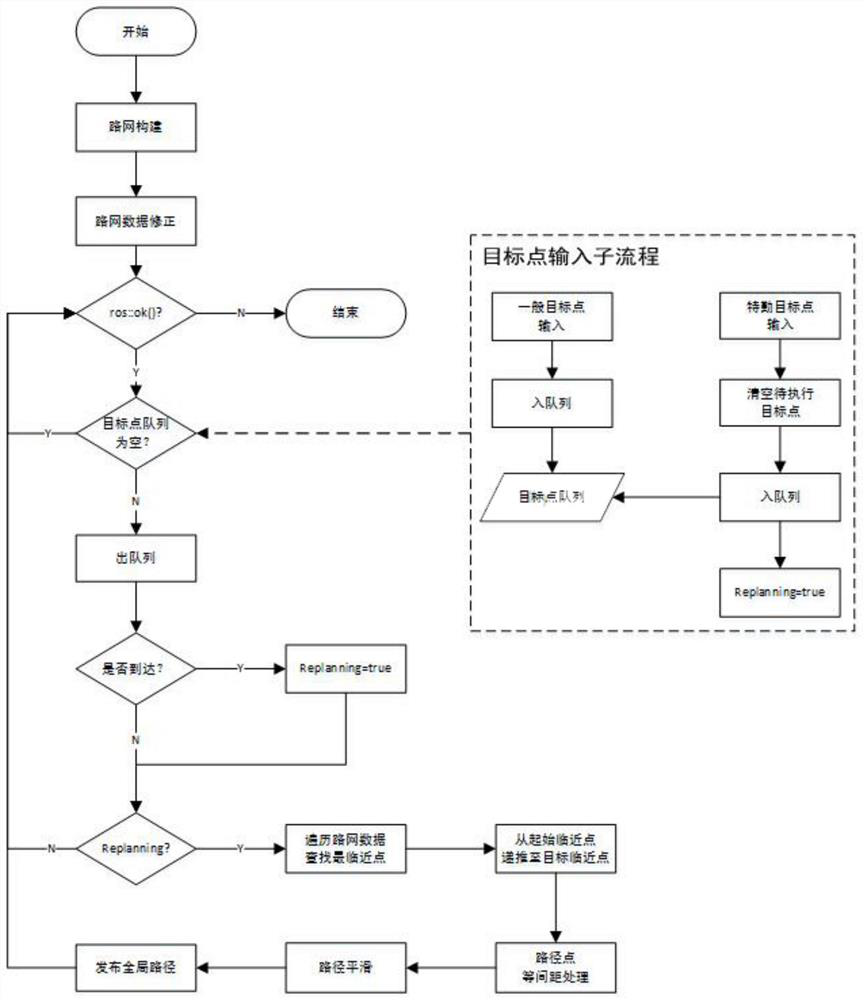
[0049] Global path planning, constructing the shortest path from the starting location to the target location based on known static environment information or road network data.
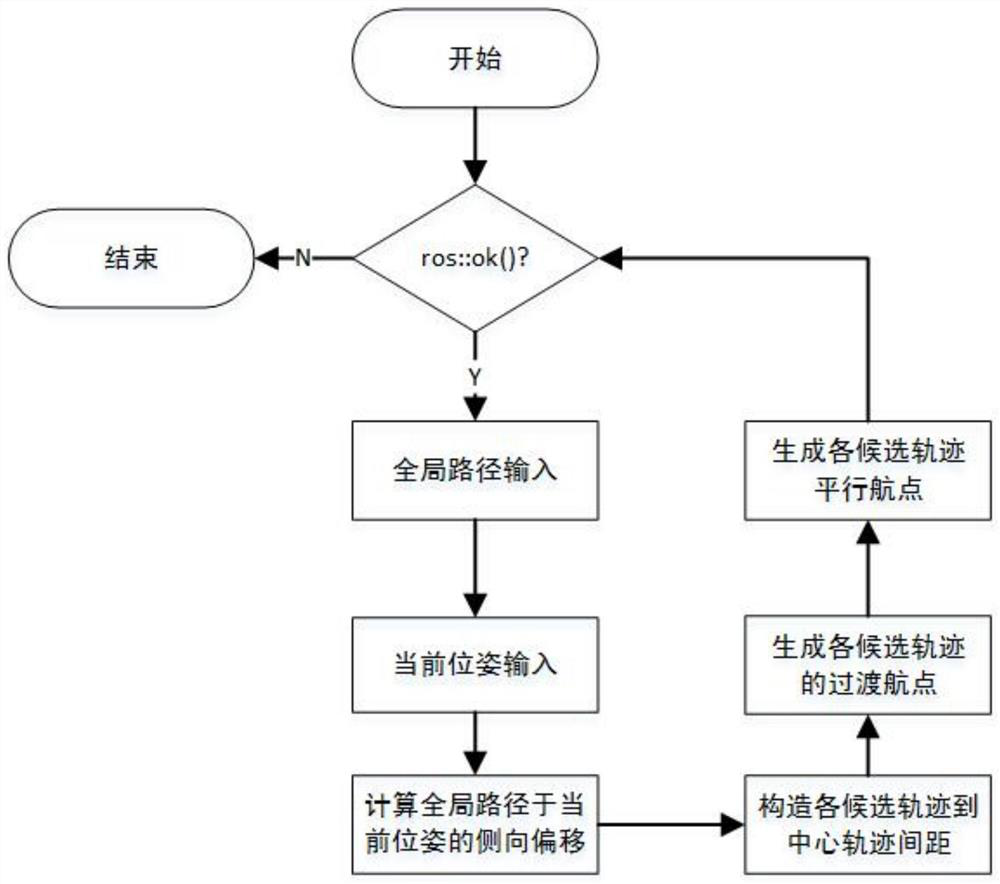
[0050] Candidate trajectory generation, based on the planned global path, intercepts its part, and generates multiple local candidate trajectories with the part of the global path segment as the center trajectory. ;
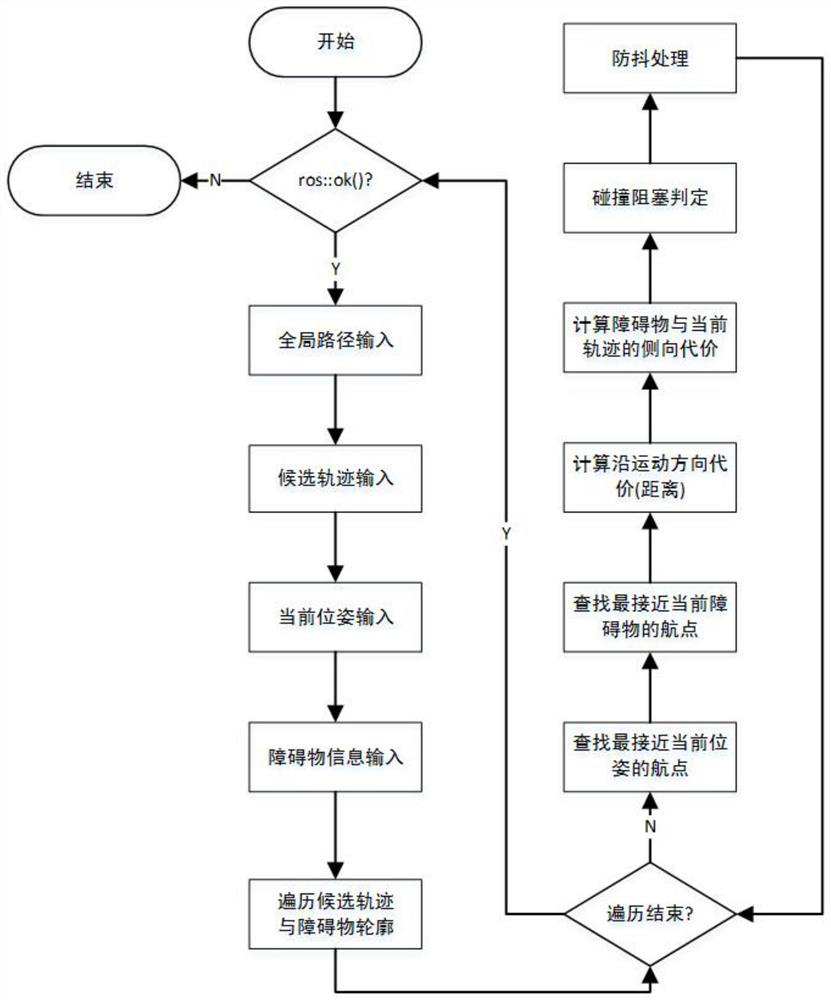
[0051] Candidate trajectory evaluation, combined with obstacle information, conducts a traversable judgment on each of the generated candidate trajectories, evaluates and selects the best, that is, evaluates the trajectory that can avoid obstacles without collision and has the least cost;
[0052] Candidate trajectory anti-shake filte...
PUM
 Login to view more
Login to view more Abstract
Description
Claims
Application Information
 Login to view more
Login to view more - R&D Engineer
- R&D Manager
- IP Professional
- Industry Leading Data Capabilities
- Powerful AI technology
- Patent DNA Extraction
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic.
© 2024 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap