

Fracture reduction robot
A technology of robots and manipulators, applied in the direction of fixers, etc., can solve problems such as poor reliability, inability to meet bone size and size fracture position adjustment requirements, high labor intensity, etc., to achieve convenient adjustment, stable and reliable arm fixation, and improved clamping effect Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0021] Further description will be made below in conjunction with drawings and embodiments.
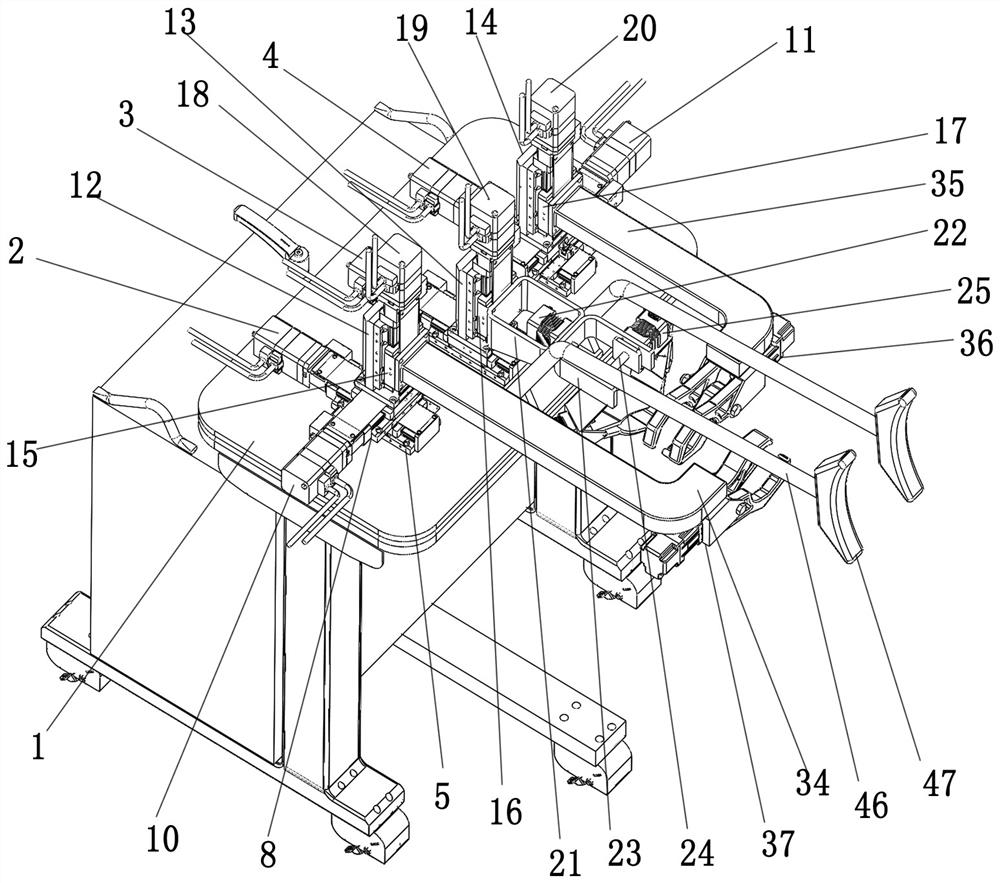
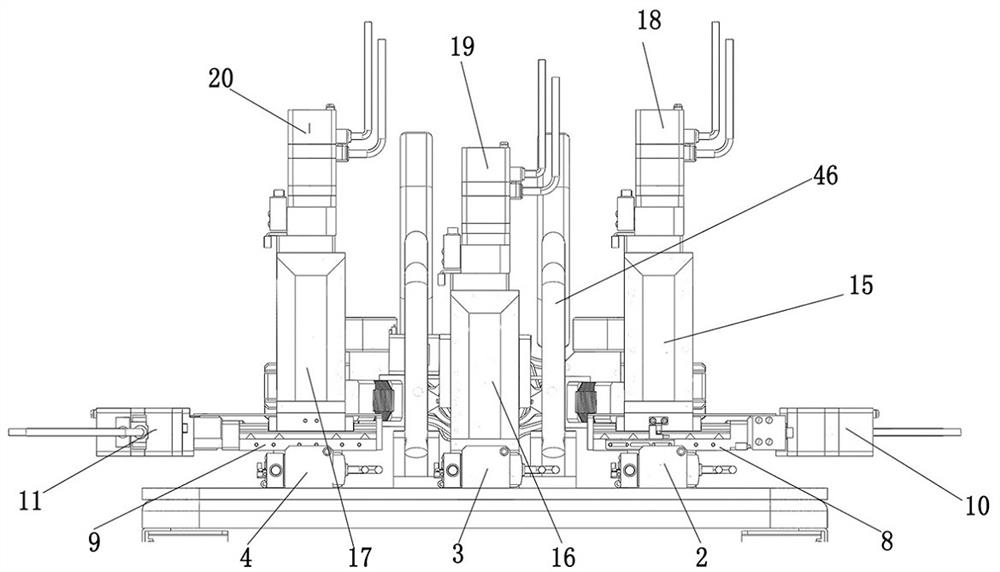
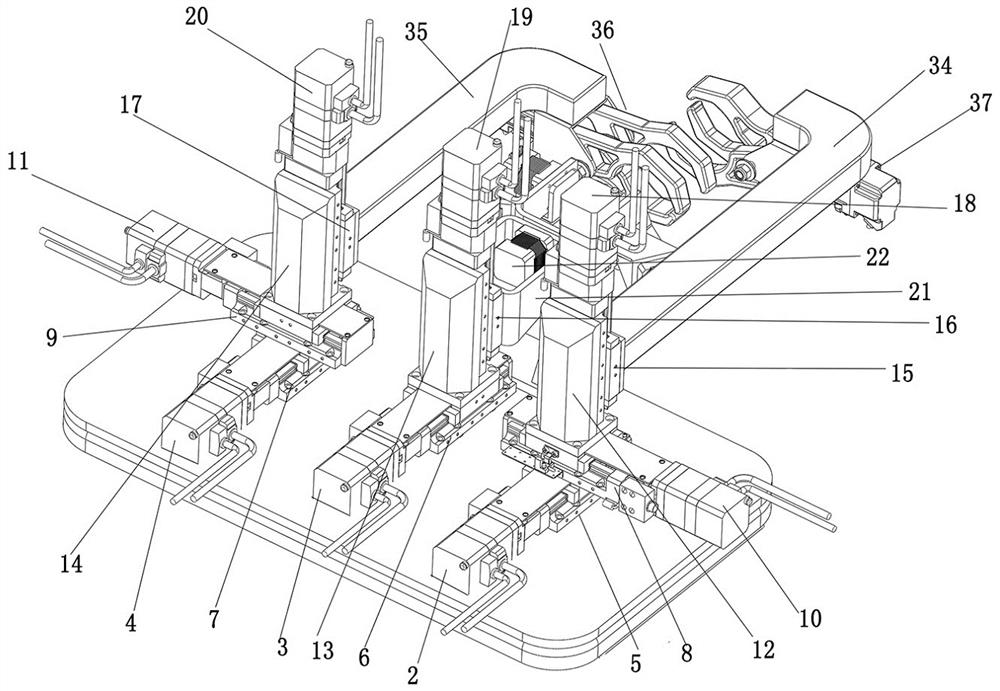
[0022] Figure 1-8 Shown: a fracture reduction robot includes workbench 1, left feed cylinder 2, middle feed cylinder 3, right feed cylinder 4, left feed track seat 5, middle feed track seat 6, right feed track seat 7. Left offset track seat 8, right offset track seat 9, left offset cylinder 10, right offset cylinder 11, left lift track seat 12, middle lift track seat 13, right lift track seat 14, left lift seat 15 , middle lifting seat 16, right lifting seat 17, left lifting cylinder 18, middle lifting cylinder 19, right lifting cylinder 20, rotating frame 21, first stepping motor 22, front end fixing plate 23, manipulator rotating shaft 24, the second step Inlet motor 25, left palm manipulator 26, right palm manipulator 27, palm manipulator support 28, palm clamping electric cylinder 29, palm clamping stretching head 30, palm clamping link plate 31, upper palm clamping plate 32, lo...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More