

Passive exoskeleton robot for enhancing human body load transportation capacity
An exoskeleton robot, transportation capability technology, applied in manipulators, program-controlled manipulators, manufacturing tools, etc., can solve the problem of not improving the nature of human driving force output, and achieve the effect of improving interference, reducing fatigue, and ensuring consistency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0036] The present invention will be described in detail below with reference to the drawings and embodiments.
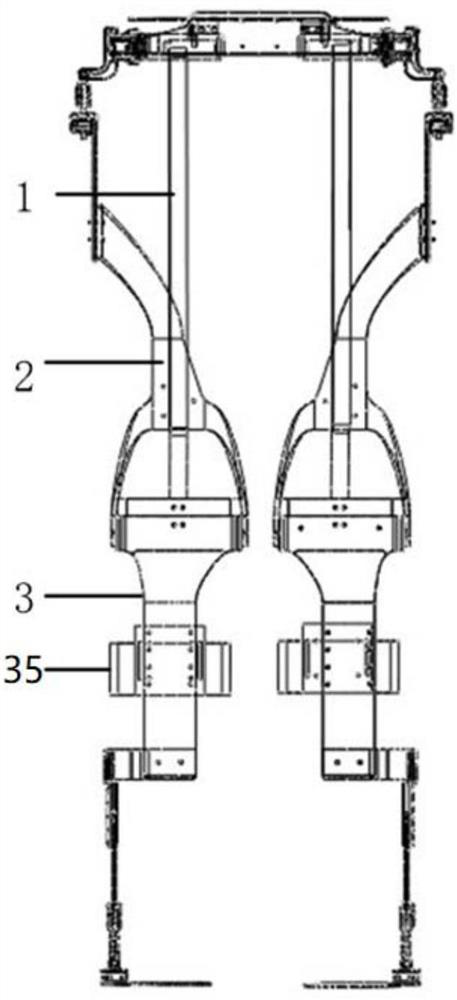
[0037] The present invention provides a passive exoskeleton robot used to enhance the human load transport capacity, such as figure 1 As shown, it includes a waist support plate component, a thigh component, a calf component, a sole component and a drawstring 1.
[0038] The waist support plate component is an unclosed ring structure, and the thigh component, the calf component, the sole component and the strap 1 are in two groups, which are symmetrically arranged about the vertical axis.
[0039] The waist support plate assembly is fixed on the waist of the human body, the unclosed side is on the front of the human body, and the back side of the human body is used to place the load; take one side as an example, the thigh assembly is fixed upwards from the hip joint to the waist support assembly, while the thigh assembly faces Turn down to the front of the thigh, and rotat...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More