Three-dimensional laser point cloud data preprocessing method and device
A 3D laser and point cloud data technology, applied in the field of information processing, can solve problems such as errors, increase algorithm complexity, and complexity, and achieve the effect of improving efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0029] In order to make the object, technical solution and advantages of the present invention clearer, the technical solution of the present invention will be described in detail below with reference to the accompanying drawings and examples.
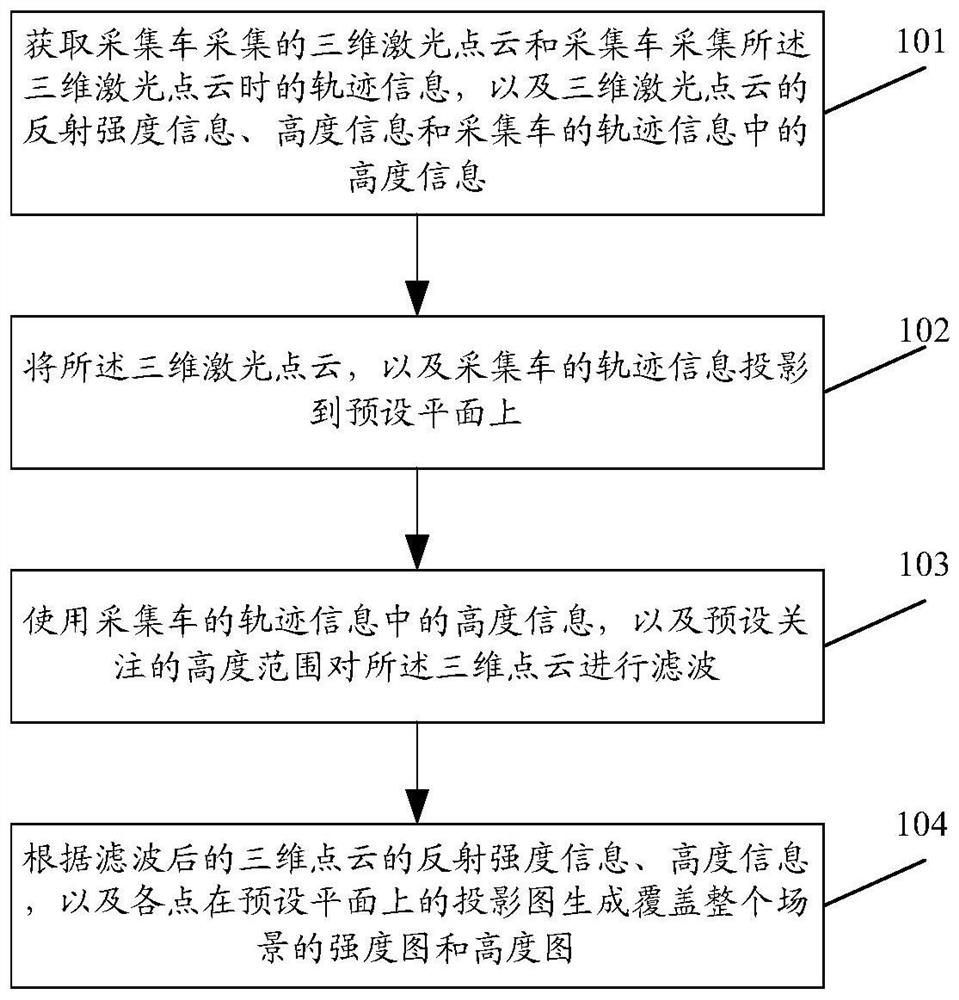
[0030] In order to meet the follow-up high-precision automatic identification requirements and facilitate the visual inspection of data results by production operators, the embodiment of the present application provides a laser point cloud data preprocessing method, which is often applied to road pseudo-spotting based on laser radar data Generation of color orthographic images. Specifically, the complex three-dimensional recognition and interaction problems based on lidar data are converted into two-dimensional data processing problems. During the implementation of the present invention, the trajectory information of the three-dimensional laser point cloud collected by the acquisition vehicle is introduced, and the preset height range ...
PUM
 Login to view more
Login to view more Abstract
Description
Claims
Application Information
 Login to view more
Login to view more - R&D Engineer
- R&D Manager
- IP Professional
- Industry Leading Data Capabilities
- Powerful AI technology
- Patent DNA Extraction
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic.
© 2024 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap