

Auxiliary arm for orthopedic surgery robot
An orthopaedic surgery and auxiliary arm technology, which is applied to surgical manipulators, surgical robots, surgical instrument support, etc., can solve the problems of high physical exertion of doctors, inability to adapt to high-intensity operations of orthopaedic surgery, and large space occupation, so as to improve space utilization. effect of space
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
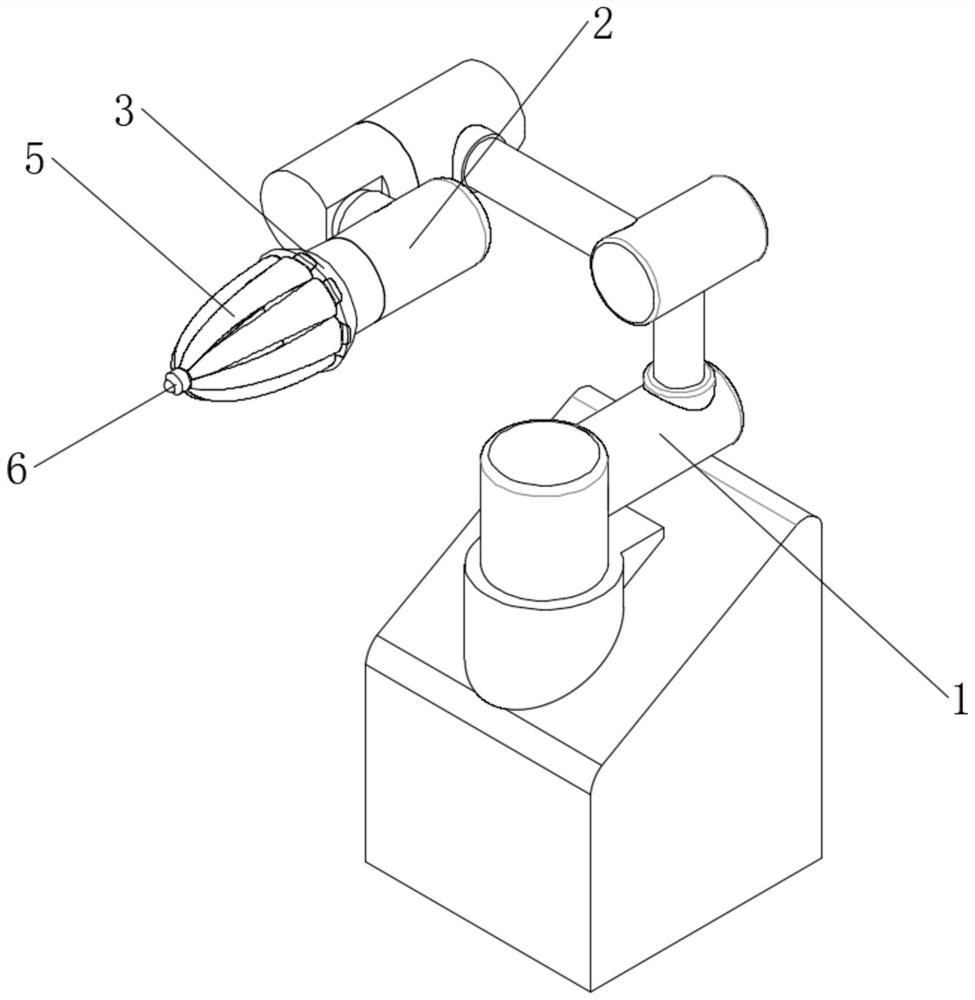
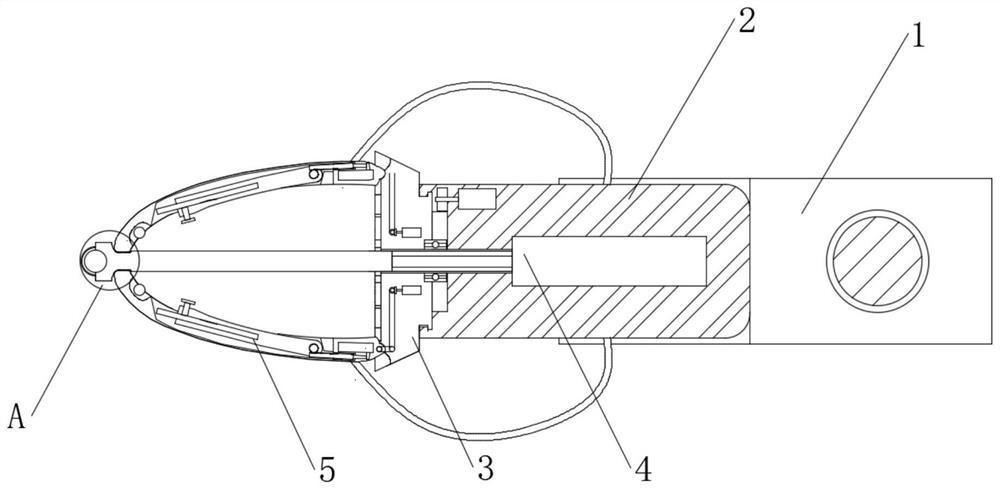
[0037] Example 1: See Figure 1-3 , an auxiliary arm for orthopedic surgery robot, comprising a main body of the mechanical arm 1, the main body of the mechanical arm 1 is connected with a movable arm span 2, and the movable arm span 2 is rotatably connected with a turntable 3, and the turntable 3 is located at one end of the movable arm span 2 Evenly distributed tooth slots are excavated, and a stepping motor is installed in the movable arm span 2, and a gear matching the turntable 3 is fixedly connected to the power output end of the stepping motor, and a first electric pusher is fixedly connected in the movable arm span 2. Rod 4, the telescopic end of the first electric push rod 4 is fixedly connected with the center rod 6, and the turntable 3 is dug with a through hole matching the telescopic end of the first electric push rod 4, and the end of the turntable 3 away from the movable arm 2 is hinged There are a plurality of evenly distributed movable claws 5, and the central...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More