

Laser radar inertial navigation odometer considering dynamic obstacles and mapping method and system
A dynamic obstacle and laser radar technology, applied in the field of AB testing, can solve difficult problems such as low drift robust pose estimation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
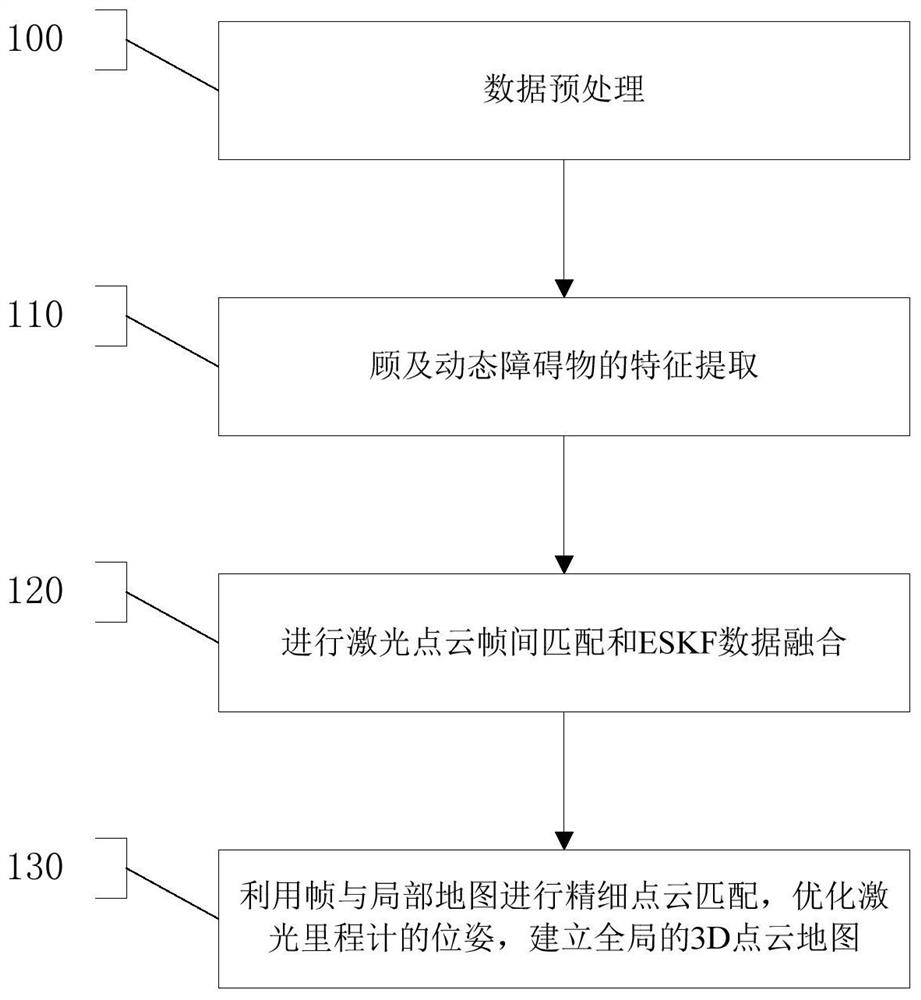
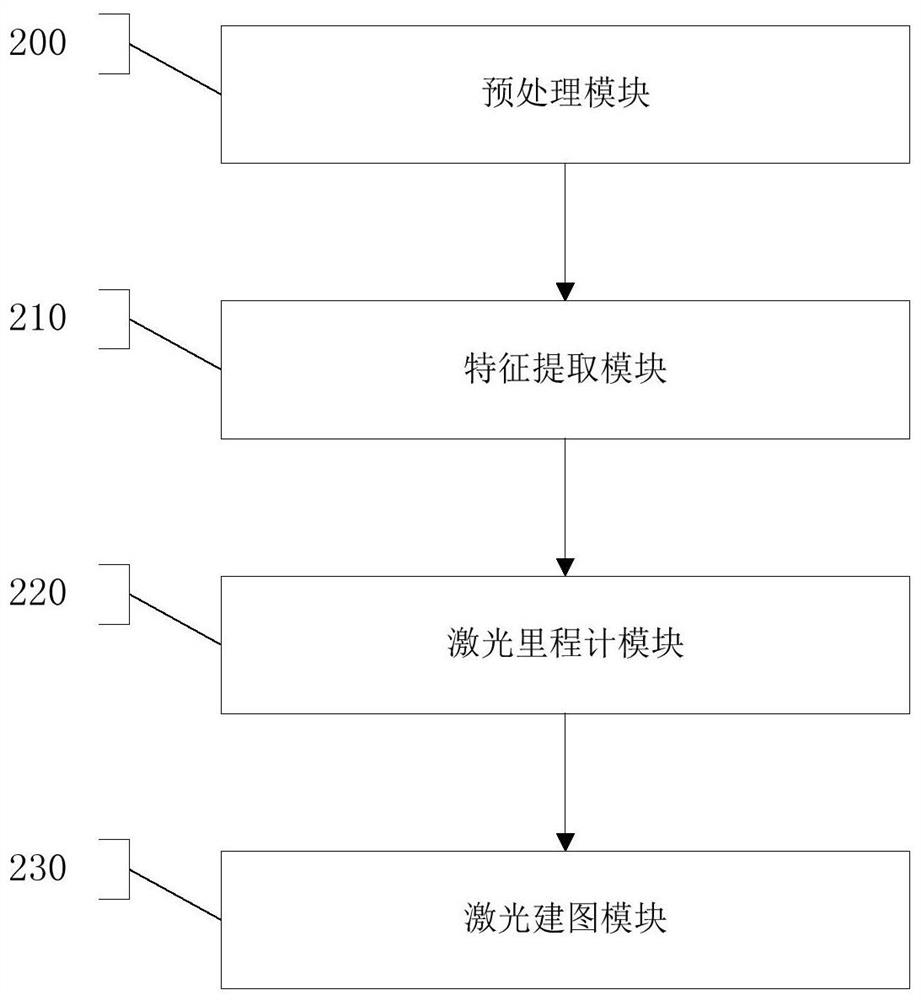
[0080] Such as figure 1 , 2 As shown, step 100 is executed, the preprocessing module 200 performs data preprocessing, and performs distortion compensation and correction on all laser point clouds in each frame through high-frequency MEMS inertial navigation assisted lidar.
[0081] The method for distortion compensation correction includes the following sub-steps:
[0082] Step 01: First find the time stamp t with the current laser point curr closest timestamp t k and t k+1 The continuous inertial navigation measurement value of ;
[0083] Step 02: Through the inertial navigation integration process, respectively obtain the state of the inertial navigation system in the world coordinate system W at time k and time k+1, the formula is:
[0084]
[0085]
[0086] Among them, p represents the position, v represents the velocity, θ represents the angular vector, x represents the orientation of the x-axis, y represents the orientation of the y-axis, and z represents the ...
Embodiment 2
[0132] The present invention improves on the basis of LOAM and Lego-LOAM schemes, focusing on improving their feature extraction and laser odometer parts, mainly including the following three aspects:
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More