

Engineering field safety monitoring method based on RTK technology
An engineering and on-site technology, which is applied in the direction of location information-based services, detection/exploration using thermal methods, instruments, etc., can solve the problems of low efficiency, time-consuming and labor-intensive safety inspections on the engineering site, and achieve the effect of improving accuracy and efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
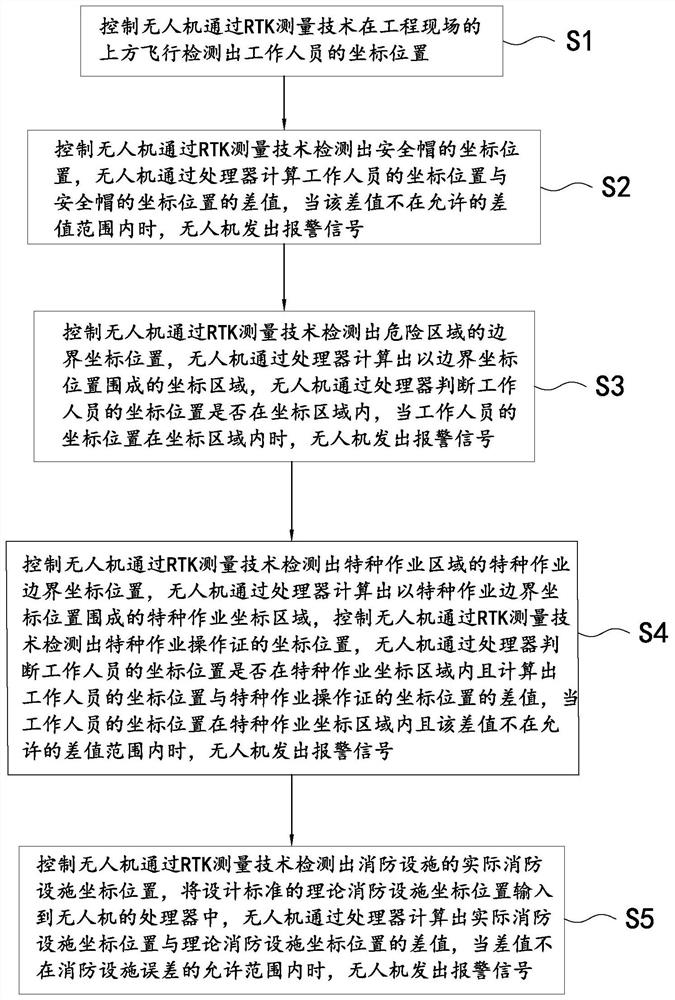
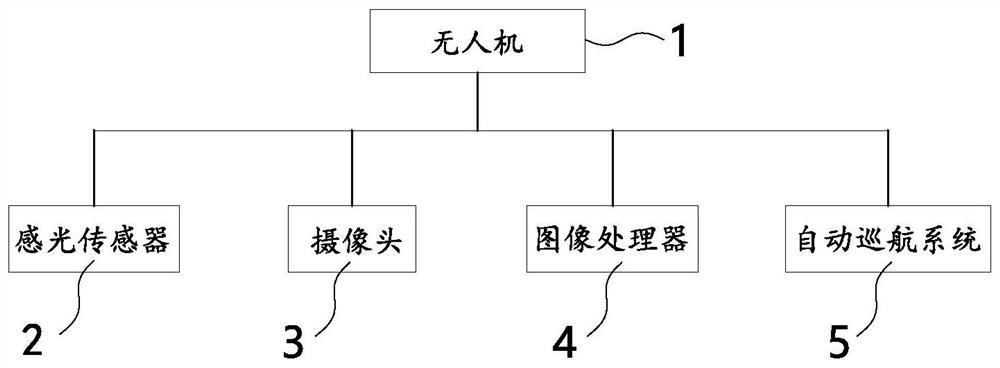
[0029] Such as figure 1 and figure 2 As shown, the preferred structure of the monitoring method of engineering site safety based on RTK technology in this embodiment includes:
[0030] Step 1S1: Control the unmanned aerial vehicle 1 to detect the coordinate position of the staff by flying above the engineering site through RTK measurement technology;
[0031] Step 2S2: Control UAV 1 to detect the coordinate position of the helmet through RTK measurement technology, UAV 1 calculates the difference between the coordinate position of the staff and the coordinate position of the helmet through the processor, when the difference is not within the allowable When within the difference range, the UAV 1 sends out an alarm signal;
[0032] Step 3S3: Control UAV 1 to detect the boundary coordinate position of the dangerous area through RTK measurement technology, UAV 1 calculates the coordinate area surrounded by the boundary coordinate position through the processor, and UAV 1 judges...
Embodiment 2
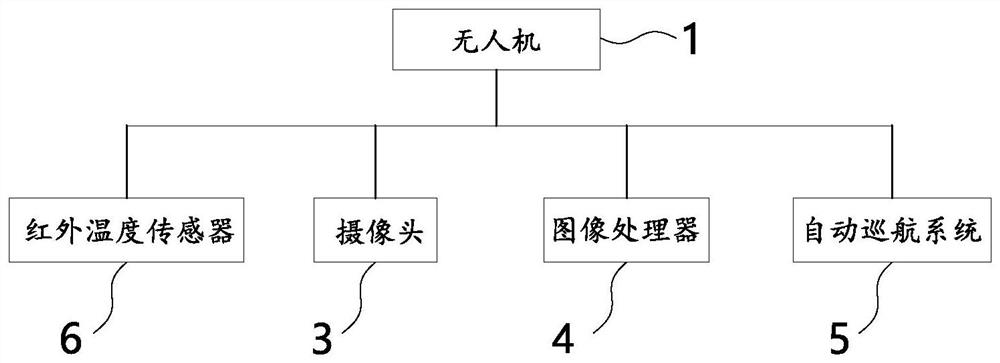
[0048] The difference between this embodiment and Embodiment 1 is that, if image 3 As shown, in this embodiment, the staff carry a first heating element, and the drone 1 is provided with an infrared temperature sensor 6, and the drone 1 works by identifying the position of the first heating element through the infrared temperature sensor 6. The coordinate position of the personnel, the safety helmet is provided with a second heating element, and the UAV 1 identifies the coordinate position of the safety helmet by identifying the position of the second heating element through the infrared temperature sensor 6. With this structure, the UAV 1 The position of the staff and the safety helmet can be located by the infrared temperature sensor 6, and this embodiment can also achieve the technical effect of the first embodiment.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More