Positioning calibration device and method for automatic nucleic acid extraction equipment
A technology for extracting equipment and calibrating devices, which is applied in image data processing, instruments, calculations, etc., can solve the problems of customers' economic losses and high labor costs, and achieve the effect of improving accuracy and reducing costs
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0043] This embodiment aims at the problem that the existing nucleic acid extraction equipment adopts the method of manual calibration, and there is a problem that the deviation causes the manipulator to shift. It provides an automatic calibration of the position of the manipulator, and real-time calibration of the position accuracy, so as to improve the accuracy of the manipulator. Accurate positioning calibration device for automated nucleic acid extraction equipment.
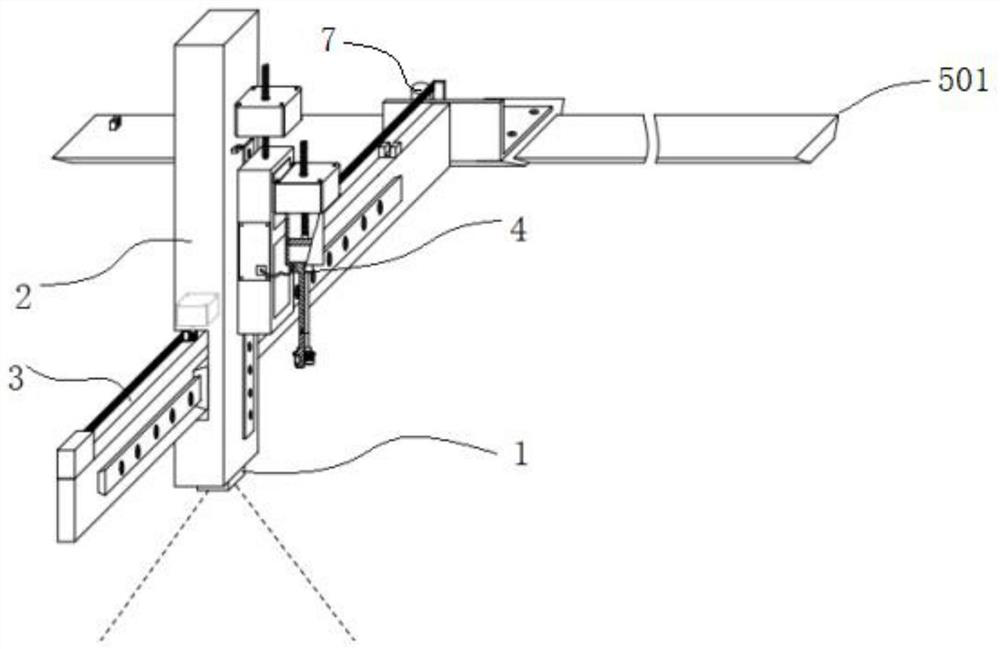
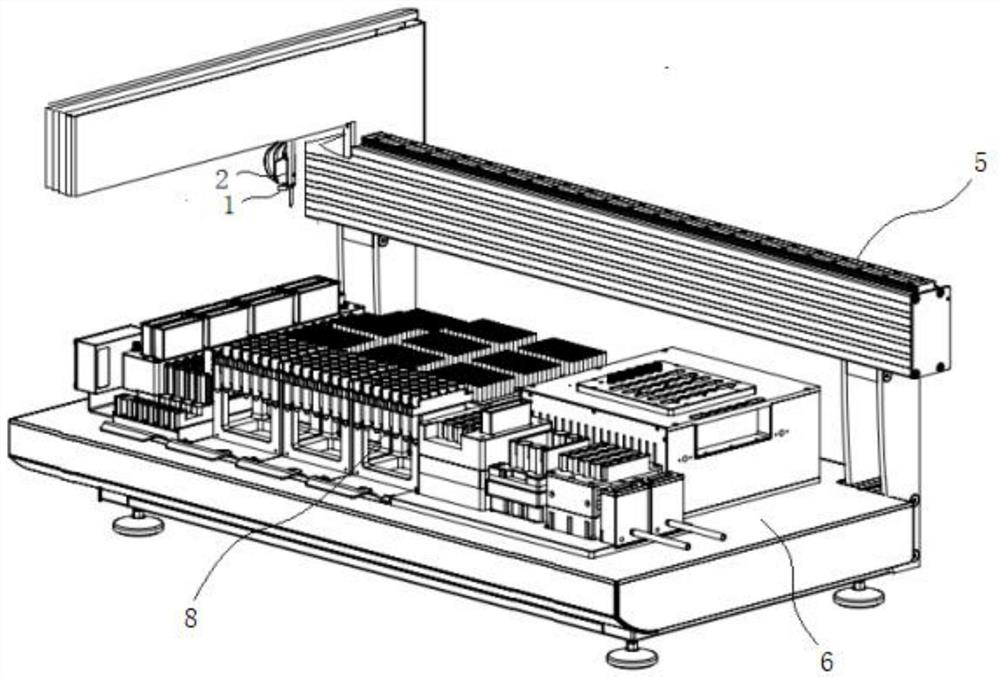
[0044] Such as figure 1 , 2 As shown, the positioning calibration device for automatic nucleic acid extraction equipment includes: a platform 6 , a bracket 5 , a robotic arm 3 , a robotic arm 4 , an image collector 1 and a controller 7 . Wherein, the platform 6 is divided into a plurality of module areas 8 with different functions and structures, and different containers or suction heads are placed in different module areas 8 . The bracket 5 is vertically fixed on one side of the platform 6 for supporting t...
Embodiment 2
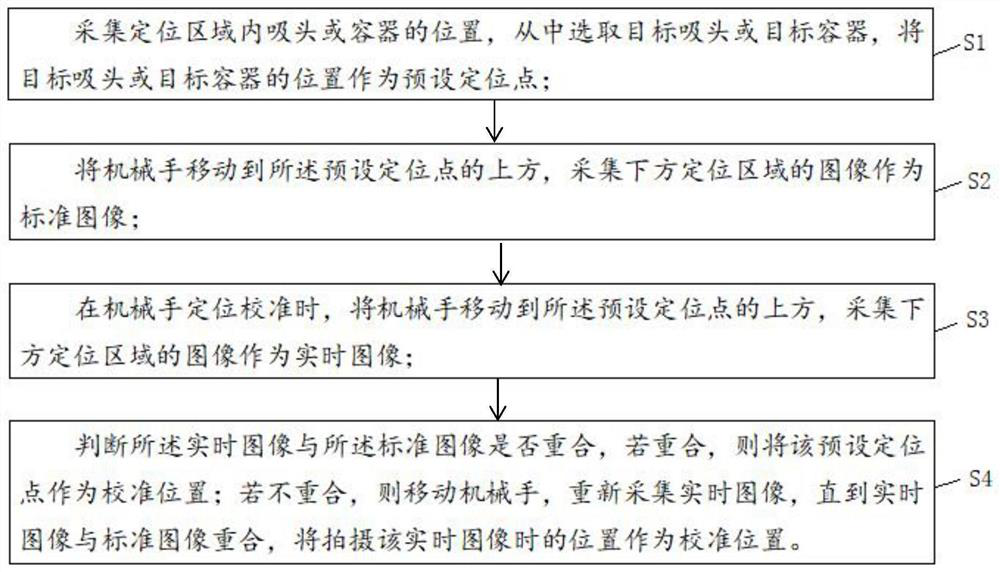
[0052] This embodiment provides a method for positioning and calibrating a manipulator, which is used in the positioning and calibrating device of the automated nucleic acid extraction equipment in Embodiment 1. Please see image 3 , the manipulator positioning calibration method, including:
[0053] S1: collect the position of the tip or the container in the positioning area, select the target tip or the target container from it, and use the position of the target tip or the target container as the preset positioning point;
[0054] S2: Move the manipulator above the preset positioning point, and collect an image of the positioning area below as a standard image;
[0055] S3: During the positioning and calibration of the manipulator, move the manipulator above the preset positioning point, and collect an image of the positioning area below as a real-time image;
[0056] S4: judging whether the real-time image overlaps with the standard image, if they overlap, use the preset...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com